
From June 13th to 16th we partook in the annual Field Robot Event, the international field robotics showdown. This year the contest was split in a real world field contest and a virtual field contest which again took place in our virtual maize field simulation environment.

As our name Kamaro (Karlsruhe maize robots) suggests we make maize and robots. While we have been obsessing about the robot part, we have been lacking maize as of late. Also, we were excited about testing our brand-new driving algorithm! So, we set about growing our very own maize field behind building 70.21. The most …

Up until now we used the Nvidia Jetson Nano for machine learning acceleration purposes. Sadly, running our object detection models wasn’t viable on the Jetson Nano despite using its CUDA-capable GPU. Our Jetson Nano only managed a poor 5 spf (seconds per frame) and had both its RAM and VRAM running out of space constantly. …
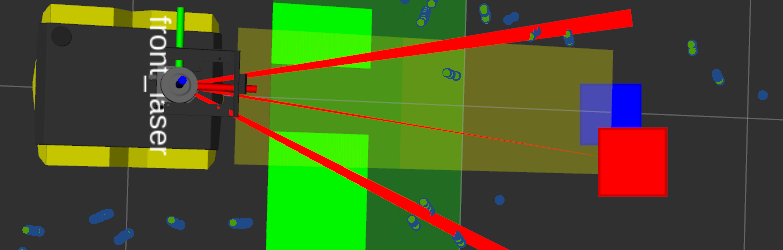
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021.
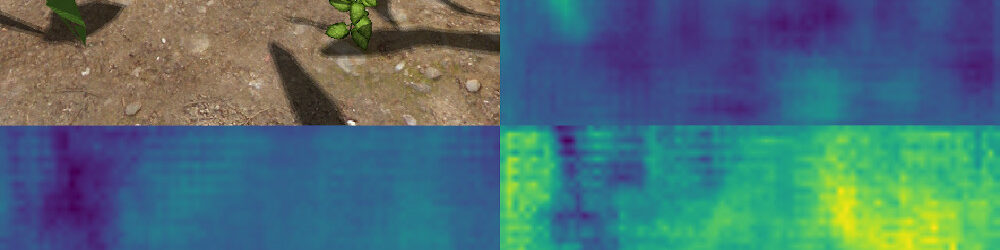
In order to facilitate the use of deep learning based object recognition, and to improve cooperation and exchange between teams, we are open-sourcing the deep learning based weed recognition software that we used at this year’s online competition (FRE 2021).
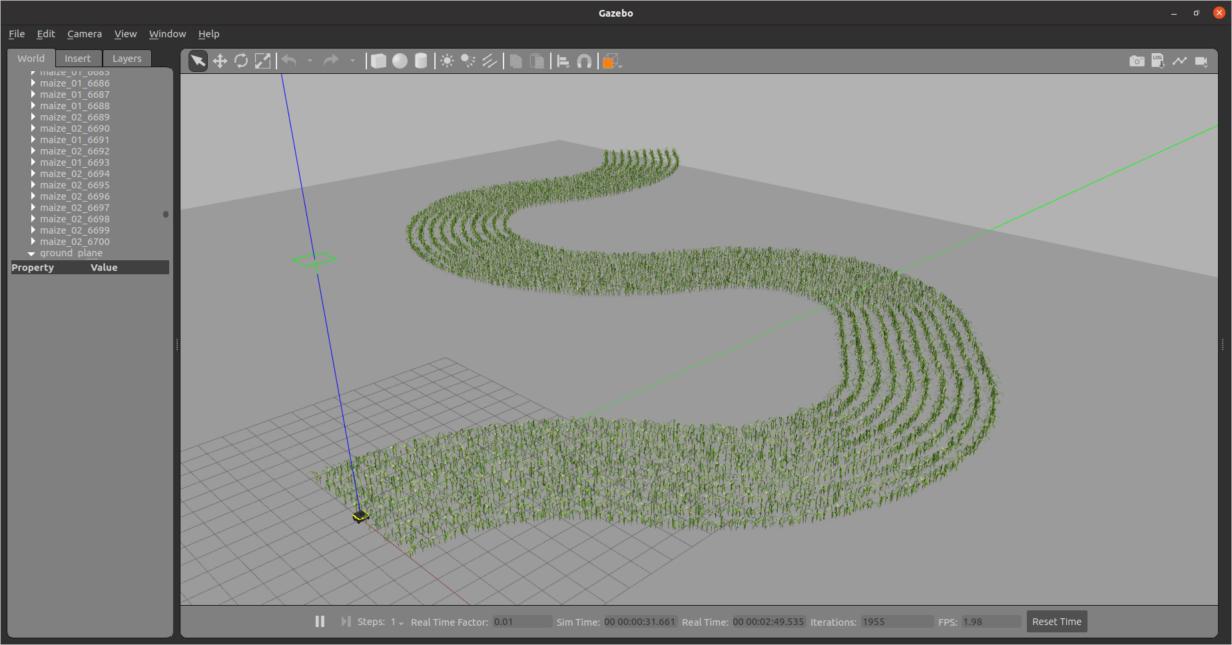
Simulation ist ein Schlüsselfaktor unserer Arbeit bei Kamaro – insbesondere bei Team Informatik. Manchmal wird der Roboter gewartet und ist nicht fahrbereit oder es steht gerade saisonbedingt kein Testfeld zur Verfügung. Um Algorithmen trotzdem testen zu können, setzen unsere Infos eine Simulationsumgebung für Roboter und Maisfeld ein, die in Gazebo erstellt wurde. Gerade in der …