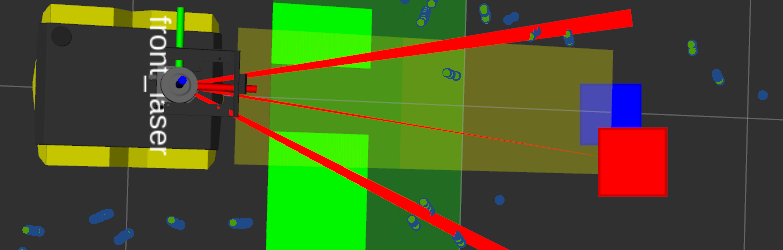
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021.
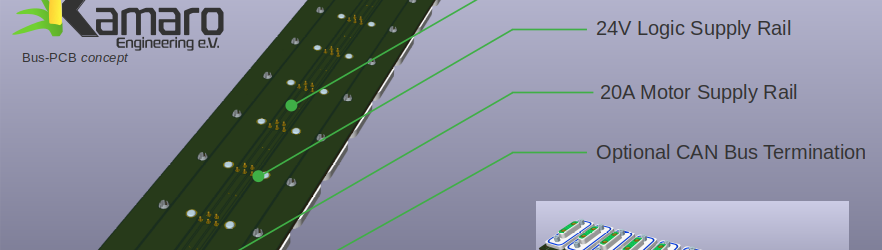
Abstract Kamaro Engineering e. V. forscht seit mehr als zehn Jahren an Feldrobotern und nimmt mit den entwickelten Prototypen an verschiedenen Wettbewerben teil. Beispielweise meistern die Roboter jährlich auf dem Field-Robot-Event neue Herausforderungen, die unterschiedlichste mechatronische Lösungen erfordern. Durch die von Event zu Event variierende Aufgabenstellung gewinnt eine modulare Bauweise mehr und mehr an Bedeutung, …