Field Robot Event 2019
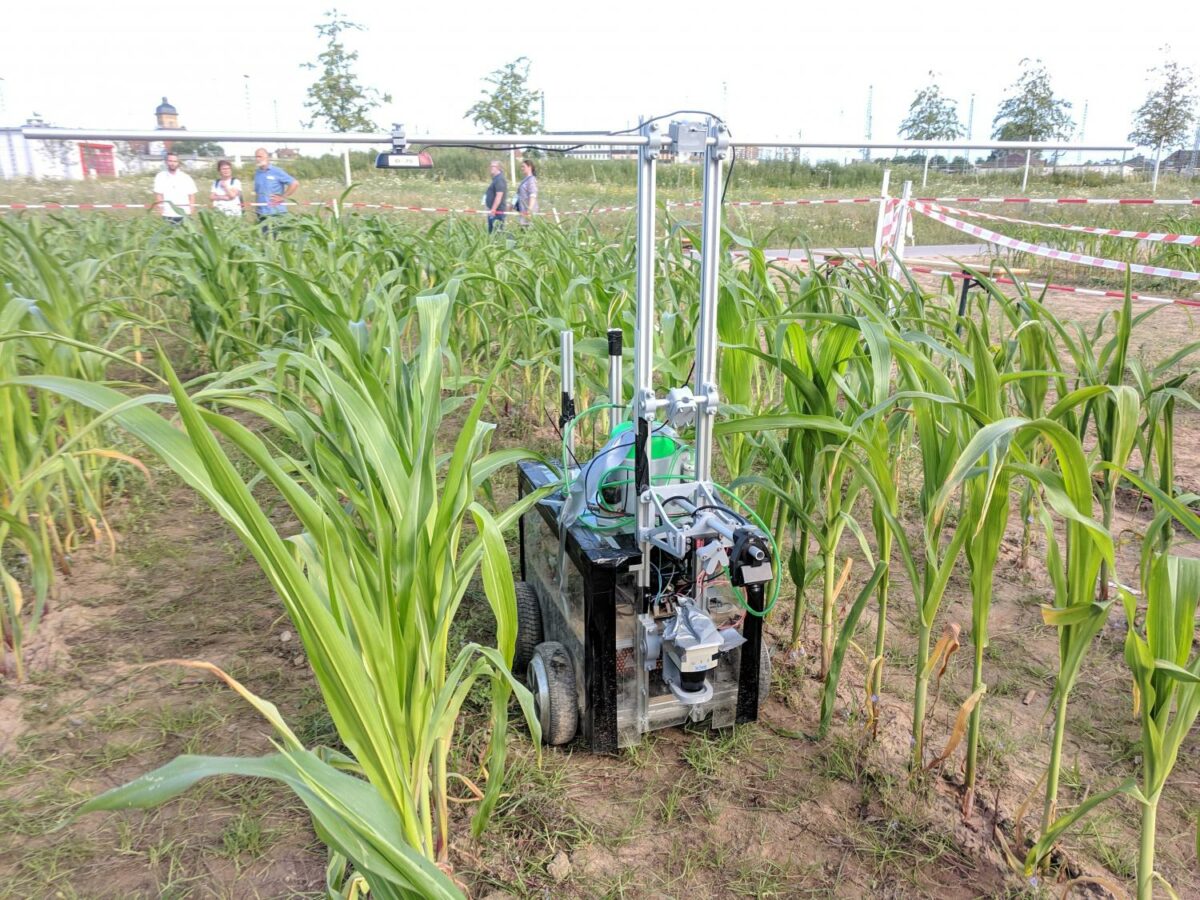
Kamaro participated in the 2019 Field Robot Event and came out in fourth place in the overall ranking, as well as second in the third task (weed detection). This year’s robot was the newly constructed model Dschubba, which utilizes hoverboard wheels and uses a differential steering. Below is a video of our freestyle task, demonstrating deep-learning based selective fertilizing on a mixed-culture field.
Keine Kommentare