
Last year, we published our dataset and models for image recognition during the online Field Robot Event 2021. Our blog post ended with a call for cooperation in creating a dataset and AI models for this year’s event, which has since taken place at DLG Feldtage in June. Successful cooperation Team Carbonite from the Überlingen …

As our name Kamaro (Karlsruhe maize robots) suggests we make maize and robots. While we have been obsessing about the robot part, we have been lacking maize as of late. Also, we were excited about testing our brand-new driving algorithm! So, we set about growing our very own maize field behind building 70.21. The most …
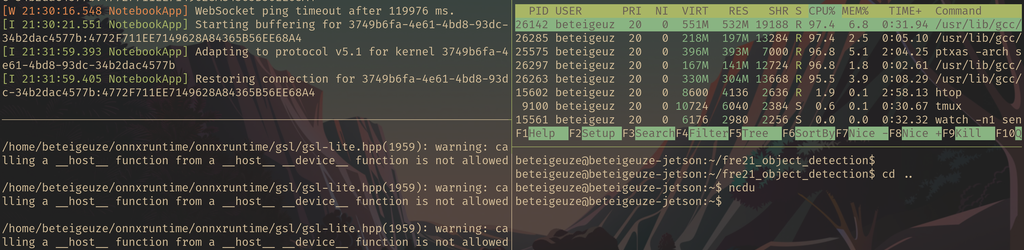
When we upgraded our robot Beteigeuze with entirely new electronic components, we decided on nVidia’s Jetson Nano platform as the robot’s primary computer. The Jetson Nano is an ARM based quad-core System-on-a-Chip (SOC) that features CUDA acceleration for Deep Learning models. As a test, we tried deploying the model that we used during last year’s …
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021.
In order to facilitate the use of deep learning based object recognition, and to improve cooperation and exchange between teams, we are open-sourcing the deep learning based weed recognition software that we used at this year’s online competition (FRE 2021).
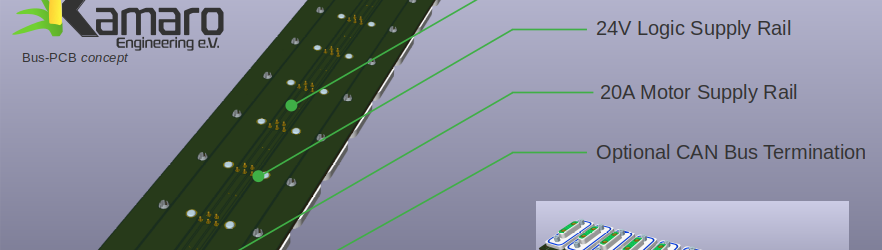
Abstract Kamaro Engineering e. V. forscht seit mehr als zehn Jahren an Feldrobotern und nimmt mit den entwickelten Prototypen an verschiedenen Wettbewerben teil. Beispielweise meistern die Roboter jährlich auf dem Field-Robot-Event neue Herausforderungen, die unterschiedlichste mechatronische Lösungen erfordern. Durch die von Event zu Event variierende Aufgabenstellung gewinnt eine modulare Bauweise mehr und mehr an Bedeutung, …
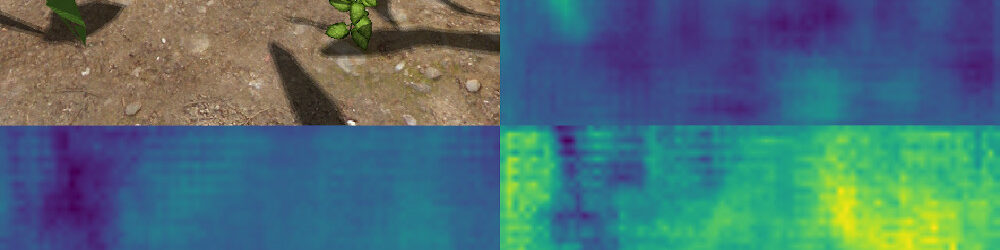
A typical task in modern farming is the measurement of the state of plants. The Normalised Difference Vegetation Index is an index commonly used to determine plant health. It is defined as following: (NIR-Red) / (NIR+Red) Healthy plants have a NDVI value near one, vegetation free areas have a value near or below 0. The RealSense …

The Graph SLAM (Graph simultaneous localisation and mapping) algorithm plays a key role in our attempts to navigate autonomously in complex environments. Take an in-depth look at how it works.
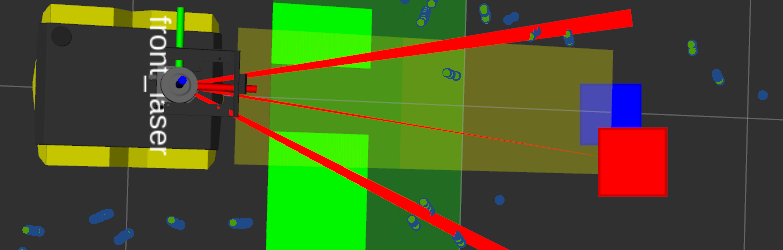
Bei der Robotour 2015 musste Beteigeuze autonom eine Route von A nach B durch eine Stadt planen und dieser dann, durch enge Gassen und vorbei an zahlreichen Hindernissen, folgen. Der Herausforderung an die Roboter konnte Beteigeuze besser als die gesamte Konkurrenz meistern und so den 1. Platz belegen. Die Skills, die Beteigeuze den Sieg einbrachten, …
Um eine detaillierte Karte der Umgebung zu erstellen, setzten wir auf einen EKF-SLAM Algorithmus. (Extendes Kalman Filter – Simultaneous Localization and Mapping) Die Kartenerstellung mit EKF-SLAM ist eine Möglichkeit für Roboter, die Welt zu sehen. Um zu verstehen was das ist, sollte man jedoch zunächst einige Grundlagen betrachten. Unser Roboter tastet mit zwei LIDAR-Scannern seine …