
Last year, we published our dataset and models for image recognition during the online Field Robot Event 2021. Our blog post ended with a call for cooperation in creating a dataset and AI models for this year’s event, which has since taken place at DLG Feldtage in June. Successful cooperation Team Carbonite from the Überlingen …

From June 13th to 16th we partook in the annual Field Robot Event, the international field robotics showdown. This year the contest was split in a real world field contest and a virtual field contest which again took place in our virtual maize field simulation environment.

As our name Kamaro (Karlsruhe maize robots) suggests we make maize and robots. While we have been obsessing about the robot part, we have been lacking maize as of late. Also, we were excited about testing our brand-new driving algorithm! So, we set about growing our very own maize field behind building 70.21. The most …

Up until now we used the Nvidia Jetson Nano for machine learning acceleration purposes. Sadly, running our object detection models wasn’t viable on the Jetson Nano despite using its CUDA-capable GPU. Our Jetson Nano only managed a poor 5 spf (seconds per frame) and had both its RAM and VRAM running out of space constantly. …
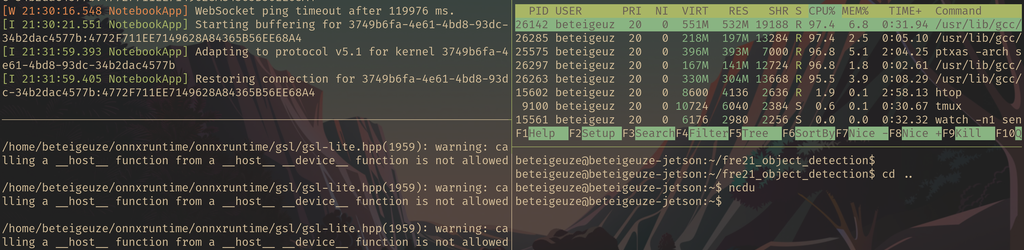
When we upgraded our robot Beteigeuze with entirely new electronic components, we decided on nVidia’s Jetson Nano platform as the robot’s primary computer. The Jetson Nano is an ARM based quad-core System-on-a-Chip (SOC) that features CUDA acceleration for Deep Learning models. As a test, we tried deploying the model that we used during last year’s …
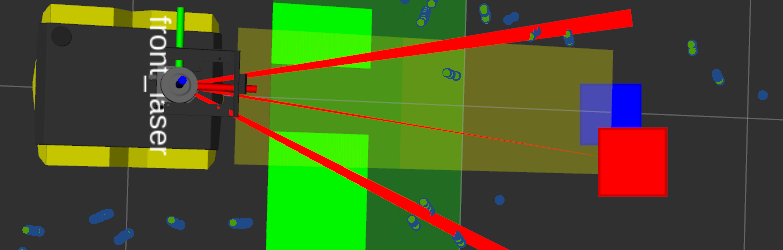
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021.
In order to facilitate the use of deep learning based object recognition, and to improve cooperation and exchange between teams, we are open-sourcing the deep learning based weed recognition software that we used at this year’s online competition (FRE 2021).
We möchten alle Interessierten herzlich zu unseren Einführungsabend am 02.11.2017 um 19:30 im Gebäude 70.04 am Campus Ost einladen (Link zur Karte unten). Hier werden wir Euch nochmal kurz unsere Hochschulgruppe mit den einzelnen Teams und Aufgabenbereichen vorstellen. Im Anschluss wollen wir auch direkt mit dem Einstiegsprojekt starten. Für das Einstiegsprojekt werdet Ihr alle Laptops …
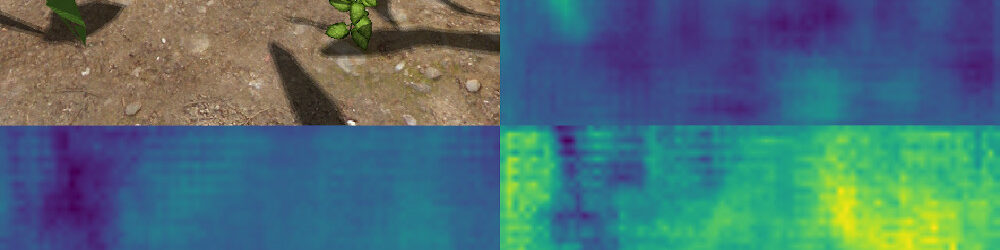
A typical task in modern farming is the measurement of the state of plants. The Normalised Difference Vegetation Index is an index commonly used to determine plant health. It is defined as following: (NIR-Red) / (NIR+Red) Healthy plants have a NDVI value near one, vegetation free areas have a value near or below 0. The RealSense …

The Graph SLAM (Graph simultaneous localisation and mapping) algorithm plays a key role in our attempts to navigate autonomously in complex environments. Take an in-depth look at how it works.
 Kamaro
Kamaro