
Last year, we published our dataset and models for image recognition during the online Field Robot Event 2021. Our blog post ended with a call for cooperation in creating a dataset and AI models for this year’s event, which has since taken place at DLG Feldtage in June. Successful cooperation Team Carbonite from the Überlingen …
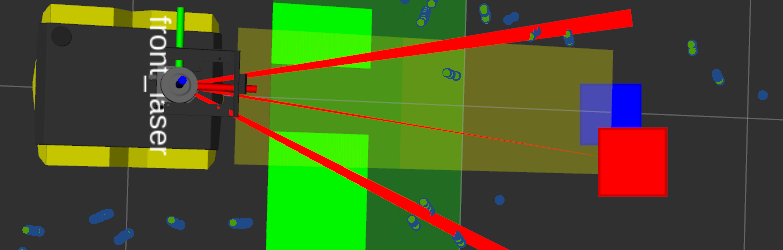
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021.
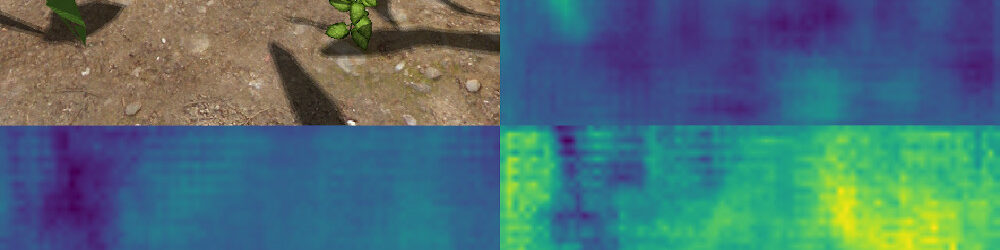
In order to facilitate the use of deep learning based object recognition, and to improve cooperation and exchange between teams, we are open-sourcing the deep learning based weed recognition software that we used at this year’s online competition (FRE 2021).

The Graph SLAM (Graph simultaneous localisation and mapping) algorithm plays a key role in our attempts to navigate autonomously in complex environments. Take an in-depth look at how it works.
 Kamaro
Kamaro