
Last year, we published our dataset and models for image recognition during the online Field Robot Event 2021. Our blog post ended with a call for cooperation in creating a dataset and AI models for this year’s event, which has since taken place at DLG Feldtage in June. Successful cooperation Team Carbonite from the Überlingen …
When we upgraded our robot Beteigeuze with entirely new electronic components, we decided on nVidia’s Jetson Nano platform as the robot’s primary computer. The Jetson Nano is an ARM based quad-core System-on-a-Chip (SOC) that features CUDA acceleration for Deep Learning models. As a test, we tried deploying the model that we used during last year’s …
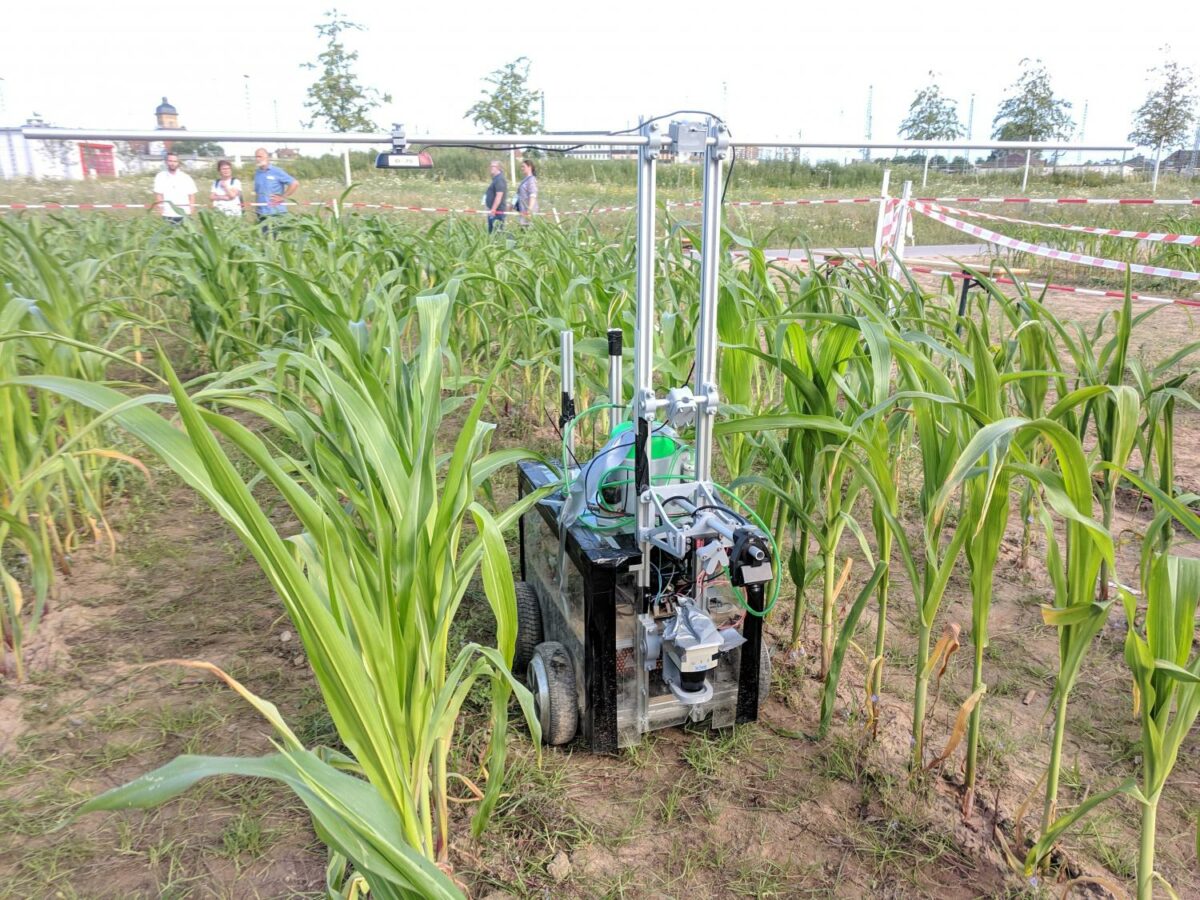
Kamaro participated in the 2019 Field Robot Event and came out in fourth place in the overall ranking, as well as second in the third task (weed detection). This year’s robot was the newly constructed model Dschubba, which utilizes hoverboard wheels and uses a differential steering. Below is a video of our freestyle task, demonstrating …