
Jahresbericht 2022
Das Jahr 2022 begann für Kamaro mit dem Ende der Ausstellung „Between War and Sea“ von Anas Kahal, für die wir unseren Roboter Cassiopeia zu einem autonomen „Beam-Roboter“ umgebaut hatten. 1 Vom 26.11.21 bis zum 16.01.22 ist der Roboter dabei fast jeden Tag autonom durch die Ausstellung Regionale 21 im E-Werk Freiburg gefahren.
Team Mechanik konstruierte und fertigte dabei einen neuen Roboterarm. Dieser sollte so leicht wie möglich sein, weshalb wir dafür alle Teile 3D drucken und so wenig Metall wie möglich verbauten. Der Arm verfügt über eine Parallelkinematik, die den Vorteil hat, dass der vordere Teil des Armes, an den die Anbauteile montiert werden können, immer im gleichen Winkel zum Boden steht. Nach ersten Tests mit den Servos hatte der Arm eine maximale Traglast von 650 g weshalb wir Servos mit doppelt so hohem Drehmoment gekauft haben. Der erneute Traglasttest für diese steht allerdings noch aus.
Unser Hauptwettbewerb — das Field Robot Event (FRE) — wurde dieses Jahr hybrid ausgetragen. Das bedeutet, dass jeder Task simuliert und anschließend im Feld bewertet wurde. Da es das erste Mal seit 2019 wieder einen Wettbewerb im Feld gab und wir gerade die elektrische Erneuerung unseres Roboters Beteigeuze angeschlossen hatten, war es naheliegend bei diesem Event den neuen Roboter zu präsentieren. Für einen erfolgreichen ersten Auftritt musste aber noch viel getan werden, weshalb wir uns entschieden uns bei der Simulationsumgebung auf dem Erfolg des letzten Jahres auszuruhen und uns voll auf den Roboter, den neuen Fahralgorithmus und machine learning zu konzentrieren.
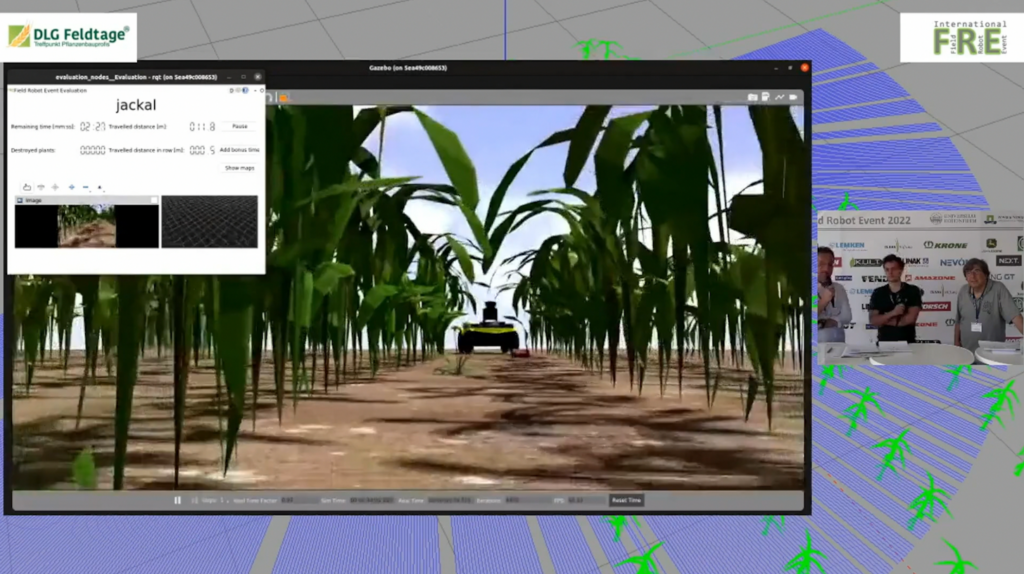
Um den Roboter für das Event startklar zu machen, haben wir noch ein paar weitere Sensoren angebaut, neue Treiber geschrieben und ein neues Ordnungssystem für Platinen ausgedacht. Außerdem mussten wir einen Mechanismus designen und fertigen, damit der Roboter in der Lage ist leere Dosen auf dem Feld aufzusammeln und an den Feldrand zu transportieren. Des Weiteren haben wir einen neuen Fahralgorithmus von der Arbeit „Laser range finder model for autonomous navigation of a robot in a maize field using a particle filter“ [1] implementiert. Der Algorithmus modelliert die benachbarten Maisreihen als geraden und schätzt deren Abstand und Orientierung. Das Modell bewertet jeden Messpunkt der Laserscanner und geht davon aus, dass die Wahrscheinlichkeit für einen Messpunkt von dessen Position abhängig ist. Für eine detaillierte Erklärung verweisen wir auch auf unsere Proceedings vom FRE 2022 oder das oben genannte Paper. Für die Objekterkennung — diesmal semi realistische Modelle von Löwenzahn — setzten wir wieder auf machine learning, da wir dies als den einzigen Weg für echte Feldanwendungen betrachten. Leider gibt es kaum freie Datensätze für Agrarrobotik, weshalb wir diese mit viel Aufwand selbst erstellen müssen. Bei der Veröffentlichung unseres Datensatzes des Vorjahres riefen wir die anderen Teams zur Zusammenarbeit auf, wodurch sich eine Kollaboration mit Team-Carbonite vom Schülerforschungszentrum (SFZ) Überlingen ergab. Insgesamt sind wir sehr zufrieden mit dem Ergebnis des diesjährigen FRE. Am Tag der Anreise zu den DLG Feldtagen in Kirschgartshausen hatten wir noch ungetestete Hardware, für die teilweise noch nicht einmal Software existierte und am Ende hatten wir für alles gut genug funktionierenden Code, um in allen Disziplinen antreten zu können. Wir konnten sogar einige Platzierungen im Simulationsteil ergattern und landeten auf dem 3. Platz des Simulationsteils für das gesamte Event.

Nach der sehr erfolgreichen Ausstellung unseres kooperativen Kunstwerks in Freiburg mischten wir auch die Kunstlandschaft in Karlsruhe auf. Beim ersten Kunstpreis der Technologie Region Karlsruhe wurden wir dieses Jahr zu den Top 4 von insgesamt ca. 40 Teilnehmer/innen nominiert. Wie wir in der nächsten Runde abschneiden, entscheidet am 14. Juni 2023 die Jury. Das Kunstprojekt Cassiopeia der Beam-Roboter in Kooperation mit dem genialen Künstler Anas Kahal lässt sich dann bei der Vernissage der Technologie Region Karlsruhe ab dem 18. Juni bestaunen.
Durch die Visualisierung des Roboterstatus lassen sich die ausgeführten Aktionen besser verstehen. Bereits 2021 entwickelten wir eine Platine mit RGB-LEDs. Die Platine besteht aus einem Ring mit 24 LEDs und einer 7×7 Matrix in der Mitte, wobei die Farbe jeder LED individuell einstellbar ist. Allerdings mussten wir feststellen, dass sich das Package der LEDs nicht zuverlässig mit Heißluft löten ließ, weshalb die innere Matrix bisher nicht bestückt werden konnte. Um das Projekt doch noch zu vollenden, nahmen unsere Elektrotechniker im August wieder Kontakt zum Elektrotechnischen Institut (ETI) auf. Das ETI verfügt über eine exzellent ausgestattete Werkstatt, in der auch ein halbautomatischer Bestücker sowie ein Dampfphasen-Lötofen vorhanden ist. Diese durften wir freundlicherweise zum Fertigen unserer Platine benutzen. Der Dampfphasen-Lötprozess lieferte gute Ergebnisse, sodass uns nun auch eine LED-Platine mit Pixel-Matrix zur Verfügung steht. Damit konnten wir das Projekt hardwareseitig fertigstellen und haben neue Möglichkeiten, die Aktionen des Roboters zu visualisieren.
Da wir einige große Projekte geplant haben, mussten wir unsere Mitgliederzahlen nach der Corona-Pandemie wieder aus der Depression und in die Konjunktur hieven und starteten eine breite Werbekampagne in Lehrveranstaltungen sowie Messen. Dieses Jahr erweiterten wir dabei unseren Horizont, indem wir auch Lehrveranstaltungen der HKA sowie der Karlshochschule besuchten. Neben der Erstsemesterbegrüßung haben wir dieses Jahr an der Hochschulgruppenmesse teilgenommen und waren wieder maßgeblich beteiligt bei der Planung der Messe der technischen Hochschulgruppen (TechHSG). Währenddessen frischten wir unsere Social Media Präsenz mit einem neuen Instragram Account (kamaro.engineering) und einem neuen Design für unsere Website auf. Wir konnten einige neue Mitglieder für Kamaro begeistern, werden dennoch im Sommersemester unsere Bemühungen weiterhin verstärken.
Zum Ende des Jahresberichts wollen wir diesmal auch einen Überblick über die Projekte geben, mit denen wir in das neue Jahr 2023 starten:
Mit unserem Projekt Kamaro Strawberry wollen wir einen Impuls setzen, wie man mit Robotik demografische Herausforderungen überwinden kann. Denn in Deutschland erleben wir dieses Jahr laut dem Deutschen Bauernverband (DBV) aufgrund der Corona-Pandemie sowie des Ukraine-Kriegs einen großen Arbeitskräftemangel beim Anbau von saisonalen Feldfrüchten wie Erdbeeren sowie Spargel. Um dieses Problem anzugehen, prototypisieren wir ein System für das autonome Ernten von Erdbeeren mithilfe von Lösungen aus der Robotik.

Bei einem weiteren Projekt mit dem Codenamen Kamaro Elektra planen wir seit 2018 das erste Mal wieder einen neuen Feldroboter. Der neue Roboter soll mehr Bewegungsfreiheit haben, weshalb wir auf Einzelradantrieb mit Einzelradlenkung setzen. Erste Ideen wurden bereits diskutiert. Hier liegt für uns aktuell der größte sentimentale Wert, da wir mit diesem Projekt neuen Mitgliedern eine Möglichkeit bieten, sich in einem Roboter, der für die kommenden Jahre das KIT beim FRE repräsentieren wird, zu verewigen.
[1] Hiremath, Santosh A., et al. „Laser range finder model for autonomous navigation of a robot in a maize field using a particle filter.“ Computers and Electronics in Agriculture 100 (2014): 41-50.
 Kamaro
Kamaro