NDVI Mapping with the RealSense R200
A typical task in modern farming is the measurement of the state of plants.
The Normalised Difference Vegetation Index is an index commonly used to determine plant health.
It is defined as following: (NIR-Red) / (NIR+Red)
Healthy plants have a NDVI value near one, vegetation free areas have a value near or below 0.
The RealSense R200 is the first affordable, outdoor usable 3d camera.
It has two NIR sensors for disparity calculation and one RGB sensor.
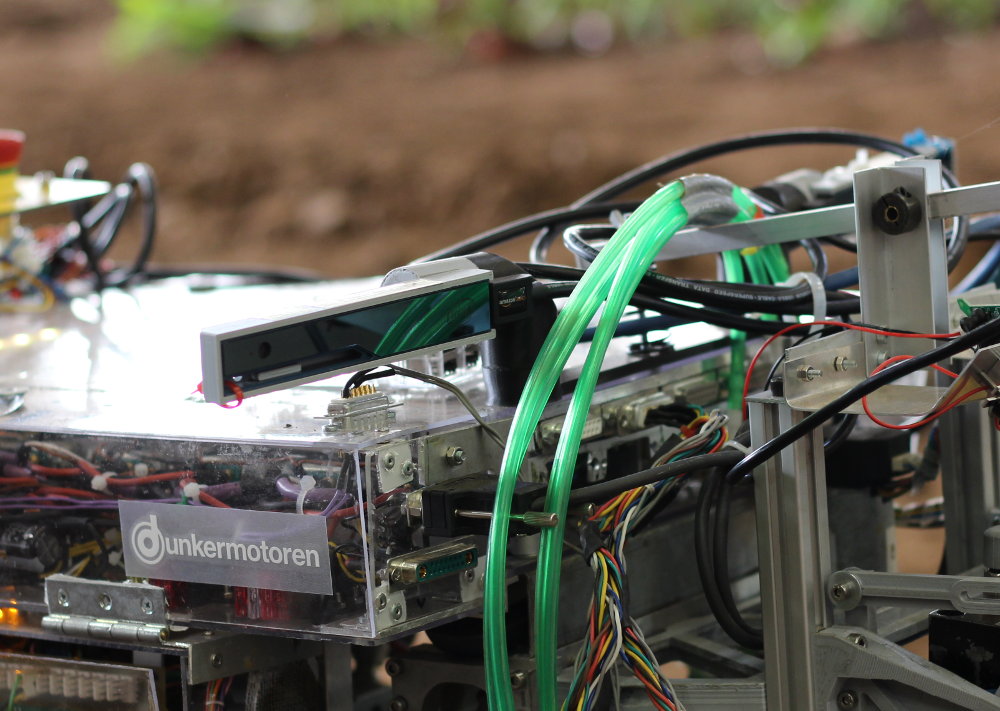
RealSense mouted to our robot
It is possible to modify a normal webcam to make it sensitive to IR light,
but this also affects the red channel that is needed for the NDVI calculation.
With the separate sensors of the RealSense all the needed information is there.
By using the depth information and the internal calibration of the camera
we can find the corresponding IR and RGB pixels for every point in the point cloud.
Another advantage of the RealSense being a 3d camera is that it does not have to be
mounted perpendicular to the ground as the top view can be calculated using the depth information.
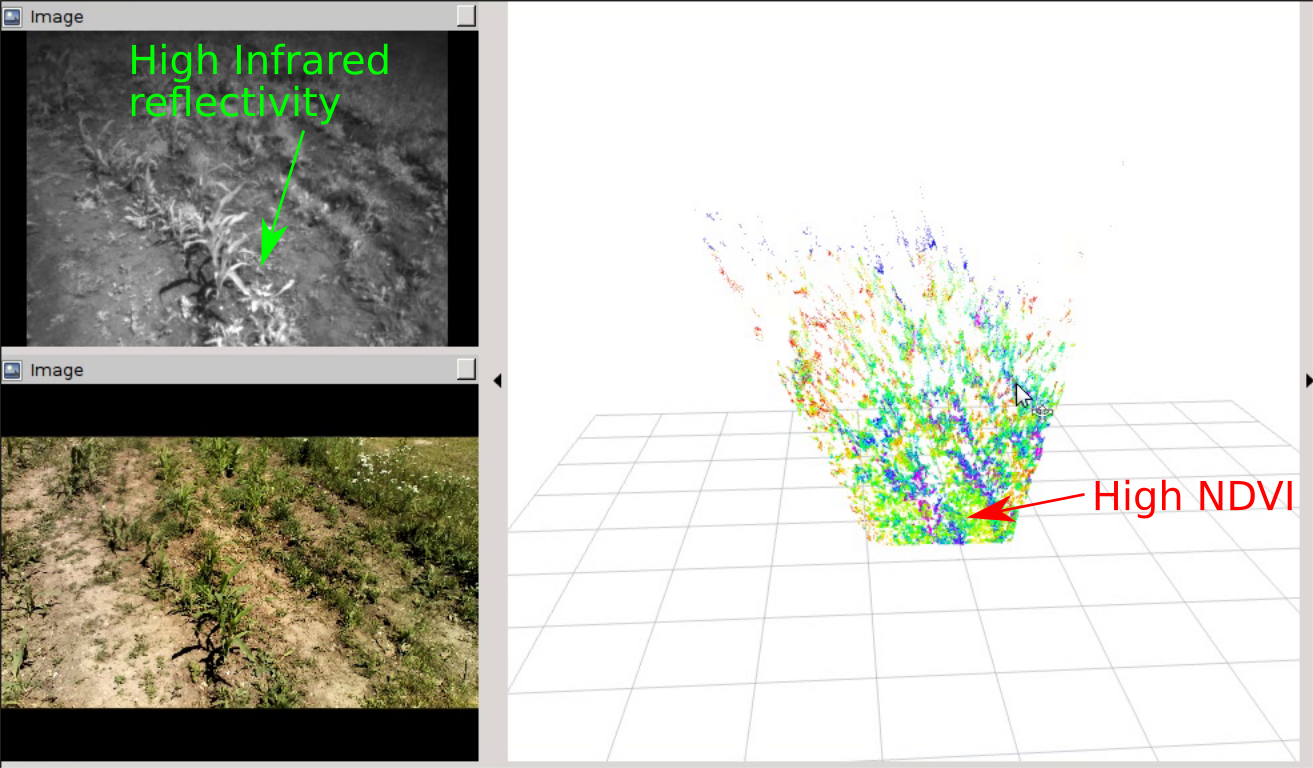
Point cloud of our test field
We used these point clouds and assembled them into a grid map using our
odometry calculated from motor encoders and the Compass.
Only points at least 10 cm above the ground were used.
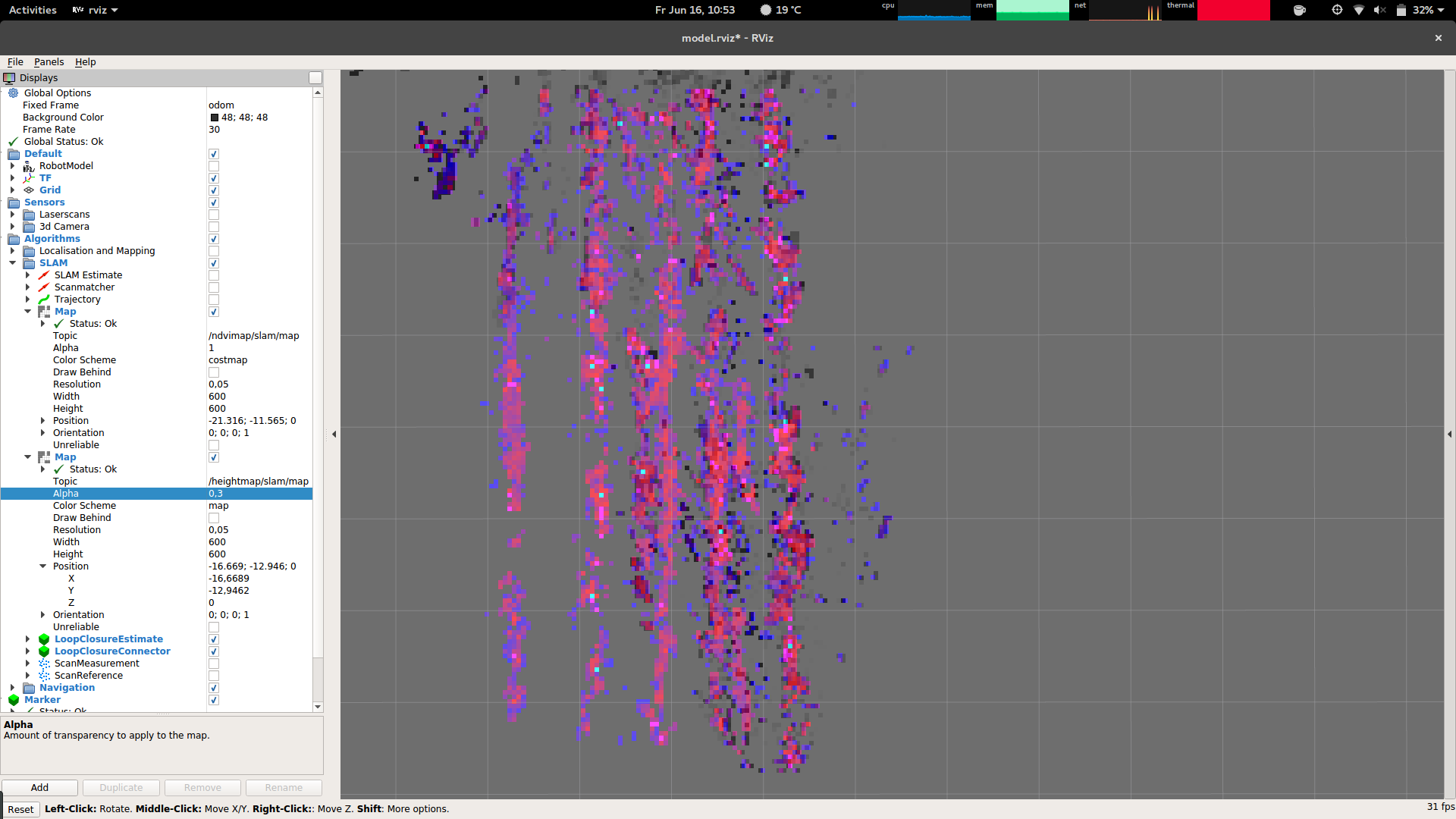
NDVI map of five maize rows (red = high)
RealSense ROS driver with our modification: https://gitlab.kamaro-engineering.de/KaMaRo-ROS/realsense_ndvi
We presented this for the freestyle task at the FRE 2017, which was very successful and was awarded the first place.
The purchase of the RealSense cameras was made possible by the „Förderverein der Studierendenschaft des Karlsruher Instituts für Technologie e. V.„. Thank you very much!
 Kamaro
Kamaro
Keine Kommentare