Field Robot Event: Berichtssaison
Das Field Robot Event 2016 endete wie es begann: in tiefem Schlamm.
Vom 13.-16.Juni 2016 versammelten sich im fränkischen Haßfurt wieder Roboterteams aus ganz Europa, um unter sich den besten der autonomen Feldroboter zu ermitteln.
Das FRE 2016

Wie schon im Jahr 2014 fand das Field Robot Event, die inoffizielle Weltmeisterschaft für autonome Feldroboter, im Rahmen der DLG-Feldtage statt.
Der wochenlange, teils heftige Regen über Teilen Deutschlands hatte auch am Veranstaltungsort der DLG-Feldtage, einem Acker beim Gut Mariaburghausen bei Haßfurt, seine Spuren hinterlassen.
Zu den DLG-Feldtagen, einer landwirtschaftlichen Freiluftmesse, kommen alle zwei Jahre Pflanzenzüchter, Landmaschinenhersteller und die Agrarindustrie zu einer Leistungsschau der Superlative zusammen.
Das Field Robot Event öffnet professionellen Ausstellern und Besuchern eine Fenster in die Zukunft der Landwirtschaft.
Bei verschiedenen Aufgaben messen sich die Roboter der Teams beim navigieren, sähen und Unkraut vernichten.
Besondere Bedingungen schuf in diesem Jahr das Wetter.
Zufahrtswege, Messegelände und selbst die Wettkampffelder waren durch den wochenlangen Starkregen völlig durchweicht.
Anfangs ziemlich ratlos, passten sich die Teams schnell den Bedingungen an, schufen Regenschutz und bauten die Roboter eilig um.
Tag 1: Task 1 & 2 – Navigation
Am Dienstag Mittag konnte der Wettkampf fast planmäßg starten, nur verzögert durch, wie könnte es anders sein, einen plötzlichen Wolkenbruch.
Die Tasks 1 und 2 sind Kennern des FRE seit langem bekannt. Maisreihen, die entsprechend üblicher Maße angelegt sind, müssen möglichst schnell und fehlerfrei druchfahren werden.
Für jeden Meter gibt es Punkte, für jeden Pflanzenkontakt, Eingriff oder Fehler beim Wenden gibt es Punktabzüge.
Nach Ablauf von 3 Minuten wird die Distanz gemessen und mit den Fehlern verrechnet.
Im Task 2 wird die Aufgabe durch Krümmung und unregelmäßige Lücken in den Reihen ergänzt.
Lassen sich die Roboter von Krümmungen verleiten oder von Lücken täuschen, gibt es Abzüge, für die gefahrene Strecke Pluspunkte.
Kamaro trat auch in diesem Jahr mit dem Roboterfahrzeug Beteigeuze, das mittlerweile als mechanisch und elektrisch relativ ausgereift gelten kann, beim Field Robot Event an.





Tag 2: Task 3 & 4 – Weeding and Seeding
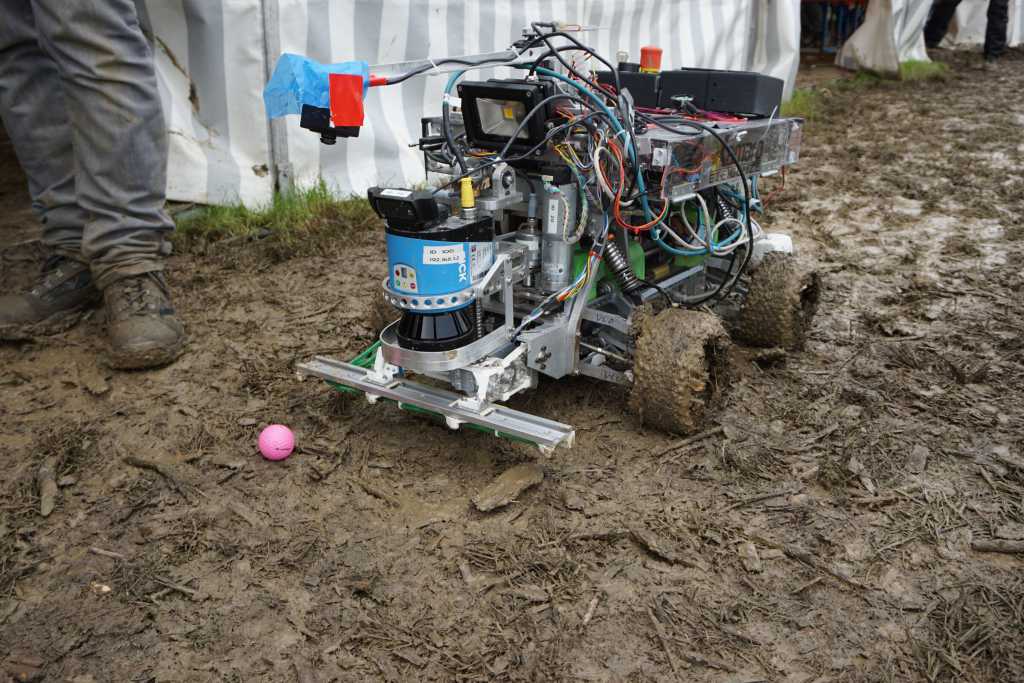 Die Aufgaben am zweiten Tag des Wettbewerbs waren teilweise neu und wesentlich anspruchsvoller. Beim erkennen und behandeln von „Unkraut“ müssen Neonrote Golfbälle erkannt und dann mit hoher Genauigkeit „behandelt“ werden. Natürlich müssen die Roboter auch dabei autonom fahren.
Die Aufgaben am zweiten Tag des Wettbewerbs waren teilweise neu und wesentlich anspruchsvoller. Beim erkennen und behandeln von „Unkraut“ müssen Neonrote Golfbälle erkannt und dann mit hoher Genauigkeit „behandelt“ werden. Natürlich müssen die Roboter auch dabei autonom fahren.
Unser Roboter Beteigeuze setzte zum erkennen auf eine Kamera mit 180°-Fisheye Objektiv. Die Erkennung funktionierte damit zuverlässig und schnell. Nur in wenigen Fällen wurde der Algorithmus durch Reflexionen der Sonne auf dem nassen Boden getäuscht.
Behandelt wurden die erkannten Bälle mit einer selbstentwickelten Sprühvorrichtung am Kopf des Roboters. Ein Balken mit vier einzeln steuerbaren Düsen auf einer IGUS-Kunststoff-Linearführung wurde durch einen Dunkermotoren-Servomotor sehr schnell hin- und herbewegt, um immer eine der Düsen über dem Ball zu positionieren. Zum sprühen wird zunächst ein Wassertank von einer Mikroluftpumpe unter Druck gesetzt. Jede der vier Düsen kann dann mit einem Magnetventil einzeln aktiviert werden.
Auch diese Apparatur konnte sich im Einsatz gut bewähren. Die Zuschauer honorierten besonders, dass die Erkennungsleistung und Aktivität des Roboters durch die deutliche Bewegung der Apparatur auch gut sichtbar wurde.
Die kümmerlichen Maispflanzen stellten den Roboter jedoch vor besondere Schwierigkeiten und so kam es kurz nach der ersten Wende zu einem folgenschweren Fahrfehler. Trotzdem reichte es im Task 3 noch für einen 3. Platz.
 Im Task 4 müssen die Roboter eine neue Saat ausbringen. Die Roboter müssen dazu mit einer Vorrichtung zur Aufnahme und zum sähen der Getreidekörner ausgerüstet sein. Unser Roboter Beteigeuze zieht dazu einen speziellen Anhänger.
Im Task 4 müssen die Roboter eine neue Saat ausbringen. Die Roboter müssen dazu mit einer Vorrichtung zur Aufnahme und zum sähen der Getreidekörner ausgerüstet sein. Unser Roboter Beteigeuze zieht dazu einen speziellen Anhänger.
Vor Beginn des Wettbewerbs kam es zu einigen Turbulenzen, denn wegen der schwierigen Wetterbedingungen musste die Aufgabenstellung etwas verändert werden. Ursprünglich hatten die Regeln vorgesehen, dass das Saatgut in Rillen eingepfügt wird. Kamaro hatte dazu eine angsteinflößende Bodenfräse mit vier angetriebenen Kreissägeblättern konstruiert, die nun schleunigst umgebaut werden musste, um den neuen Regeln gerecht zu werden.
Zunächst müssen die Roboter ihre Vorrichtungen unter einem Saatgutspender platzieren und diesem dann ein Signal per W-LAN senden. Wird das Signal korrekt empfangen, gibt der Spender das Saatgut frei und füllt es in den Trichter.
Entlang einer Markierung am Boden muss das Saatgut dann vom Roboter möglichst gleichmäßig verteilt werden.
Wie immer muss der gesamte Vorgang vollständig autonom erfolgen. Bewertet werden die Schritte zum Aufnehmen des Saatgutes sowie die Fläche und die Gleichmäßigkeit der Verteilung.








Tag 3: Freestyle – Charging by witchcraft
Traditionell findet zum Abschluss des Wettbewerbs am dritten Tag des Field Robot Events der Freestyle Task statt. Hier dürfen die Teams Anwendungen autonomer Maschinen in der Landwirtschaft zeigen. Es gibt keine Regeln, bewertet werden die Relevanz und die Qualität der Umsetzung und schlussendlich die Ausführung.
Kamaro nutzt den Freestyle Task in jedem Jahr um die besondere Breite der Kompetenzen im Bereich Maschinenbau und Elektrotechnik in unserem großen Team unter Beweis zu stellen.
In diesem Jahr haben wir uns der Energieversorgung der autonomen Maschine auf dem Feld angenommen.

Um selbstständig Arbeiten zu können, müssen die Maschinen regelmäßig mit Energie versorgt werden. Die Versorgung durch eine stationäre Ladestation ist hierzu das naheliegenste Konzept. Problematisch ist allerdings, die Station auch in schwierigem Gelände wiederzufinden. Um dieses Problem zu lösen, haben wir uns einiger Magie bedient.
Hierzu haben wir eine Ladestation gebaut, die mit einem Funkfeuer (einem W-LAN Router) markiert ist. Der Roboter ist mit einer Richtantenne ausgerüstet, die von einem Motor stetig um 180° geschwenkt wird.
Der Roboter richtet sich auf das Signal aus und bewegt sich auf die Ladestation zu. Dieses Verfahren ist sehr robust und funktionierte auch auf dem Wettbewerb einwandfrei.
Sobald die Station auch mit den Kameras erfasst werden kann, richtet sich der Roboter genau an deren Markierungen aus.
Um den elektrischen Kontakt herzustellen, ist der Roboter mit zwei Kontaktbürsten ausgerüstet. Die an der Ladestation angebrachten Kontaktplatten vervollständigen das System. Die auf den Kontaktbesen reitenden Hexen waren Namensgebend für diese Vorführung.
Das Ladesystem ist tatsächlich voll funktional und kann den Roboter, wie im Wettbewerb gezeigt, mit Energie versorgen. limitiert ist die übertragbare Energie nur durch das verwendete 24 V Netzteil, dass derzeit ca. 600 W liefert.
Die Grenzen der Kontaktbürsten konnten wir noch nicht ermitteln, wir halten jedoch 1 kW oder mehr für machbar.
Die originelle Idee mit starkem Anwendungsbezug und die perfekte Vorführung einer funktionalen Station überzeugten auch die Jury, so dass Kamaro mit dem ersten Platz im Freestyle ausgezeichnet wurde.
Field Robot Event 2016: Das Ende
Das Field Robot Event 2016 wird uns noch lange in Erinnerung bleiben.
Die Wetterbedingungen waren extrem und verlangten Mensch und Material alles ab. Selbst normalerweise simple Vorgänge wie der Transport unserer Ausrüstung wurden zu schwierigen Unterfangen. Auch die Messeorganisation der DLG war durch die Bedingungen so stark unter Druck, dass nicht mehr alle Probleme mit professioneller Souveränität gelöst werden konnten.
Allerdings zeigte sich auch, dass unser Team und unsere Ausrüstung auch unter so außergewöhnlichen Bedingungen funktionieren können. Der Roboter Beteigeuze schlug sich wacker, auch wenn im Task 3 ein Differential kaputt ging und nur noch eine Achse angetrieben war. Die Preise für die Unkrauterkennung und besonders der erste Platz im Freestyle sind eine willkommene Motivation für die Titelverteidigung bei der Robotour und den SICK Robot Day später im Herbst.
Wir bedanken uns bei allen teilnehmenden Teams und den Organisatoren um Prof. Griepentrog von der Universität Hohenheim.
Wir freuen uns auf das Field Robot Event 2017 und sind gespannt, welche neuen Herausforderungen uns erwarten und welches Land wir kennen lernen werden!
































































 Kamaro
Kamaro
Keine Kommentare