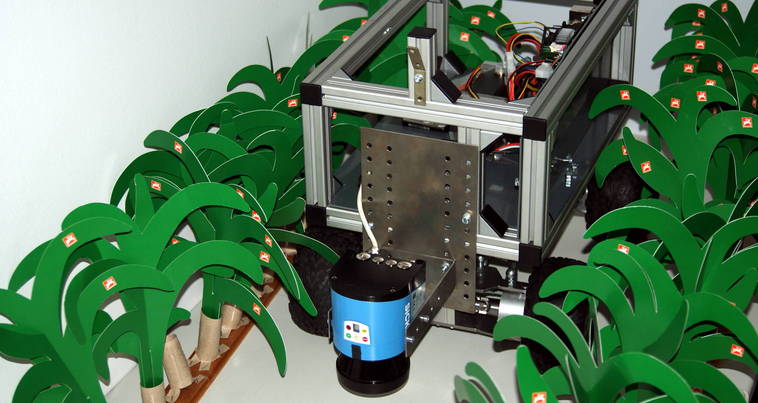
Der erste Roboter aus dem Hause Kamaro.
Viele Ideen wurden hier zum ersten Mal ausprobiert, viele verworfen, manche für gut empfunden.
Die Grundideen waren:
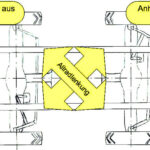
- Steuerung des Roboters über vier separat angetriebene und lenkbare Räder
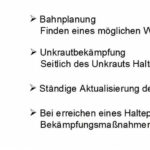
- Navigation durch einen Lasersensor mit Unterstützung durch Infrarot und einer Zusammenstoßdetektion
- Objekterkennung durch eine Kamera
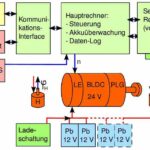
- On-board Rechner auf ITX-Board

Viele der hier vorgestellten Konzepte wurden nur teilweise umgesetzt, manche komplett anders. Letztendlich ist daraus einer unserer derzeitigen Roboter, Beteigeuze, eine komplette Neukonstruktion, bei der auf viele Details geachtet wurde, entstanden.