Robotour 2015: Das Geheimnis wird gelüftet
Bei der Robotour 2015 musste Beteigeuze autonom eine Route von A nach B durch eine Stadt planen und dieser dann, durch enge Gassen und vorbei an zahlreichen Hindernissen, folgen.
Die Herausforderung an die Roboter konnte Beteigeuze besser als die gesamte Konkurrenz meistern und so den 1. Platz belegen. Die Skills, die Beteigeuze den Sieg einbrachten, werden im folgenden genauer beleuchtet.
EKF-SLAM erklärt: Wie sieht ein Roboter die Welt?
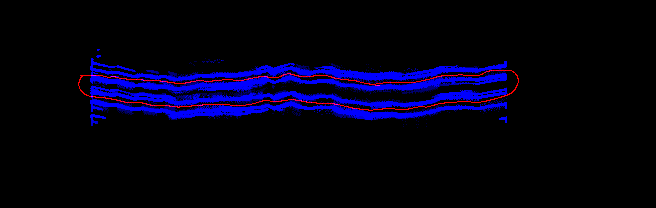
Um eine detaillierte Karte der Umgebung zu erstellen, setzten wir auf einen EKF-SLAM Algorithmus (Extendes Kalman Filter — Simultaneous Localization And Mapping). Die Kartenerstellung mit EKF-SLAM ist eine Möglichkeit für Roboter, die Welt zu sehen. Um zu verstehen was das ist, sollte man jedoch zunächst einige Grundlagen betrachten.
Unser Roboter tastet mit zwei LiDAR-Scannern seine Umgebung 360 ° ab. Mit Hilfe dieser Sensoren können Objekte erkannt und Richtungsentscheidungen getroffen werden. Allerdings kann der Roboter so nicht gezielt navigieren, sondern höchstens Objekten ausweichen. Mit unserem Mapping Algorithmus speichern wir die Daten der Scanner und fügen sie Schritt für Schritt zu einer Karte zusammen. In dieser kann der Roboter sich dann lokalisieren und gezielt zu bestimmten Positionen fahren. Das Erstellen einer Karte einer unbekannten Umgebung unter gleichzeitiger Lokalisierung des Roboters ist eines der großen Probleme in der Robotik. Die Lösungsansätze werden in einer eigenen Klasse - SLAM - zusammengefasst.

FRE 2015 – Ein Resümee
Kamaro fährt beim Field Robot Event den bisher größten Erfolg in der Geschichte des Vereins ein und bereichert den Wettbewerb gleich um eine neue Disziplin.
Wie sieht ein Roboter die Welt
Was dem Menschen spielerisch einfach gelingt, gehört zu den schwierigsten Aufgaben der Informatik.
Fliegende Bälle zwischen chaotisch umherlaufenden Spielern auf dem Sportplatz, rangieren mit Anhänger auf engen Baustellen oder Zwiebeln schneiden ohne Blutvergießen. Für den Menschen mit seiner genialen Sensorik kein Problem.
Bis Heute gibt es Forschern manches Rätsel auf, wie genau das eigentlich funktioniert. Doch auch die Technik entwickelt sich schnell, automatische Einparkhilfen oder Spurhalteassistenten sind schon längst im Massenmarkt angekommen.

SICK Robot Day 2014
Vier Roboter in einer Arena: Unfälle nach Möglichkeit vermeiden.
Am 11. Oktober 2014 ist es endlich soweit: Zum ersten mal nimmt ein Team von Kamaro Engineering am Robot Day in Waldkirch teil. Der vom Sensor Hersteller SICK ausgerichtete Wettbewerb für Roboterbauer findet in diesem Jahr bereits zum fünften mal statt, in diesem Jahr ist es uns gelungen, einen der begehrten Startplätze zu erhalten.
Field Robot Event 2014
Ebay, Apple, OpenSSL - FRE2014 GoTo Fail
Das Jahr 2014 zeigt uns, obwohl erst halb verstrichen: Ohne mühselig selbst implementierte Softwarefehler kann man in der Liga der ganz großen nicht mitspielen. Fest orientiert auf Wachstum, Fortschritt und markige Worte, kurz: Exzellenz in Planung und Ausführung, haben auch wir diesen Makel unserer bisherigen Arbeit erkannt und ihm schnellstmöglich abgeholfen. Nein, wie an der satirisch-verklärenden Einleitung erkennbar, zu Gewinnen gab es für unseren Roboter in diesem Jahr leider nichts.
Field Robot Event 2013
Am Mittwoch den 26.06.2013 macht sich der studentische Verein Kamaro Engineering e. V. aus Karlsruhe auf nach Prag, um beim diesjährigen Field Robot Event, dem internationalen Wettbewerb für autonome Landmaschinen, teilzunehmen.
Beim Field Robot Event werden Aufgaben gestellt, die Problemen aus der Landwirtschaft nachempfunden sind. Die Teilnehmer werden von einer Jury beobachtet, die dann Punkte für erfolgreiche Aktionen, sowie Strafen für Fehler vergibt
Software Reboot
Wir schreiben Freitag den 15.02.2013, ein Teamtreffen steht an – dieses mal ist es aber doch etwas anders: Zum ersten mal wollen wir den Roboter mit unserer neuen Software in Betriebe nehmen und mit eiem Gamepad fahren. Vor einem Monat haben wir erst die Entwicklungsumgebung eingerichtet. Erst vor drei Wochen waren die Stummel für die notwendigen Klassen für diese Aufgabe fertig.