Publishing our Object Detection Network and Dataset
FRE 2021 is over! It’s been a great week seeing all of the other teams again and competing with one another. We are grateful for the opportunity we had in building the competition environment and shaping this year’s Field Robot Event!
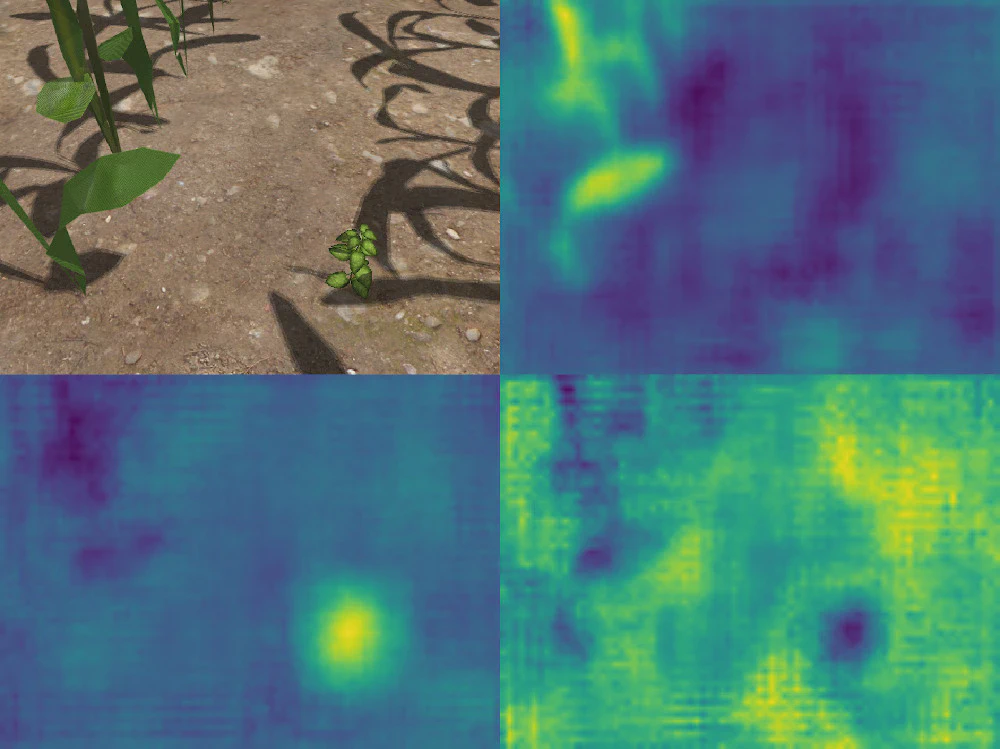
We were especially pleased with the organizers’ decision to include realistic 3D plant models for the weed detection task. For a long time, simple color-based detectors were sufficient to solve the detection tasks at the Field Robot Event. However, such approaches are not adequate to perform a plant recognition task in a realistic scenario. On the real field, robots will have to distinguish between multiple species of plants — all of which are green — in order to perform weeding, phenotyping and other tasks. Deep learning has been around for a few years now and seems to be the most applicable tool to tackle this challenge.
Kamaro unterstützt das virtuelle FRE 2021
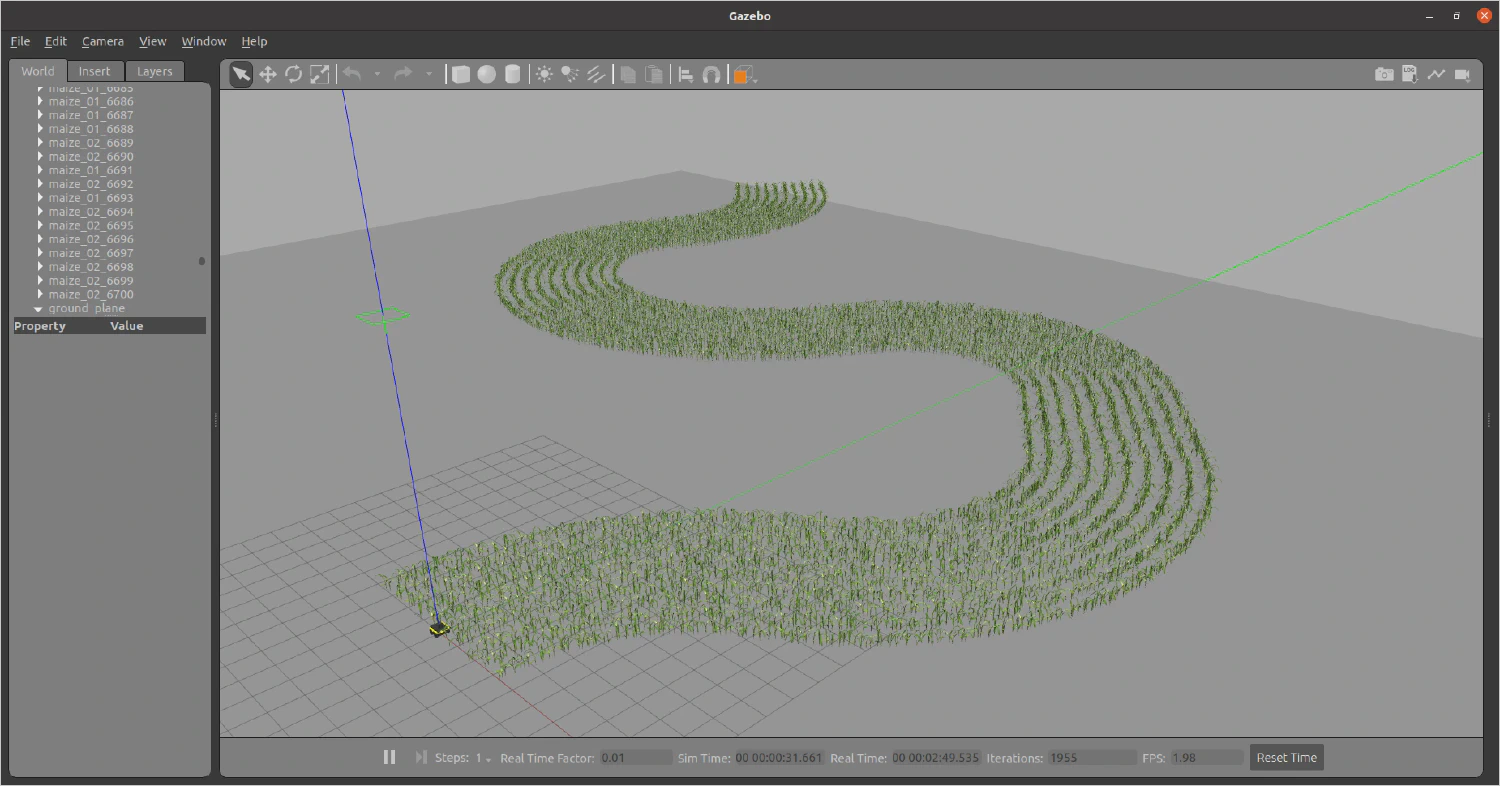
Simulation ist ein Schlüsselfaktor unserer Arbeit bei Kamaro – insbesondere bei Team Informatik. Manchmal wird der Roboter gewartet und ist nicht fahrbereit oder es steht gerade saisonbedingt kein Testfeld zur Verfügung. Um Algorithmen trotzdem testen zu können, setzen unsere Infos eine Simulationsumgebung für Roboter und Maisfeld ein, die in Gazebo erstellt wurde.
Gerade in der Pandemie bringt dies einen weiteren Vorteil: Obwohl eine Arbeit vor Ort teilweise unmöglich geworden ist, können wir bestehende Projekte weiterentwickeln und neuen Code testen – möglich durch Simulation.