Field Robot Event 2019
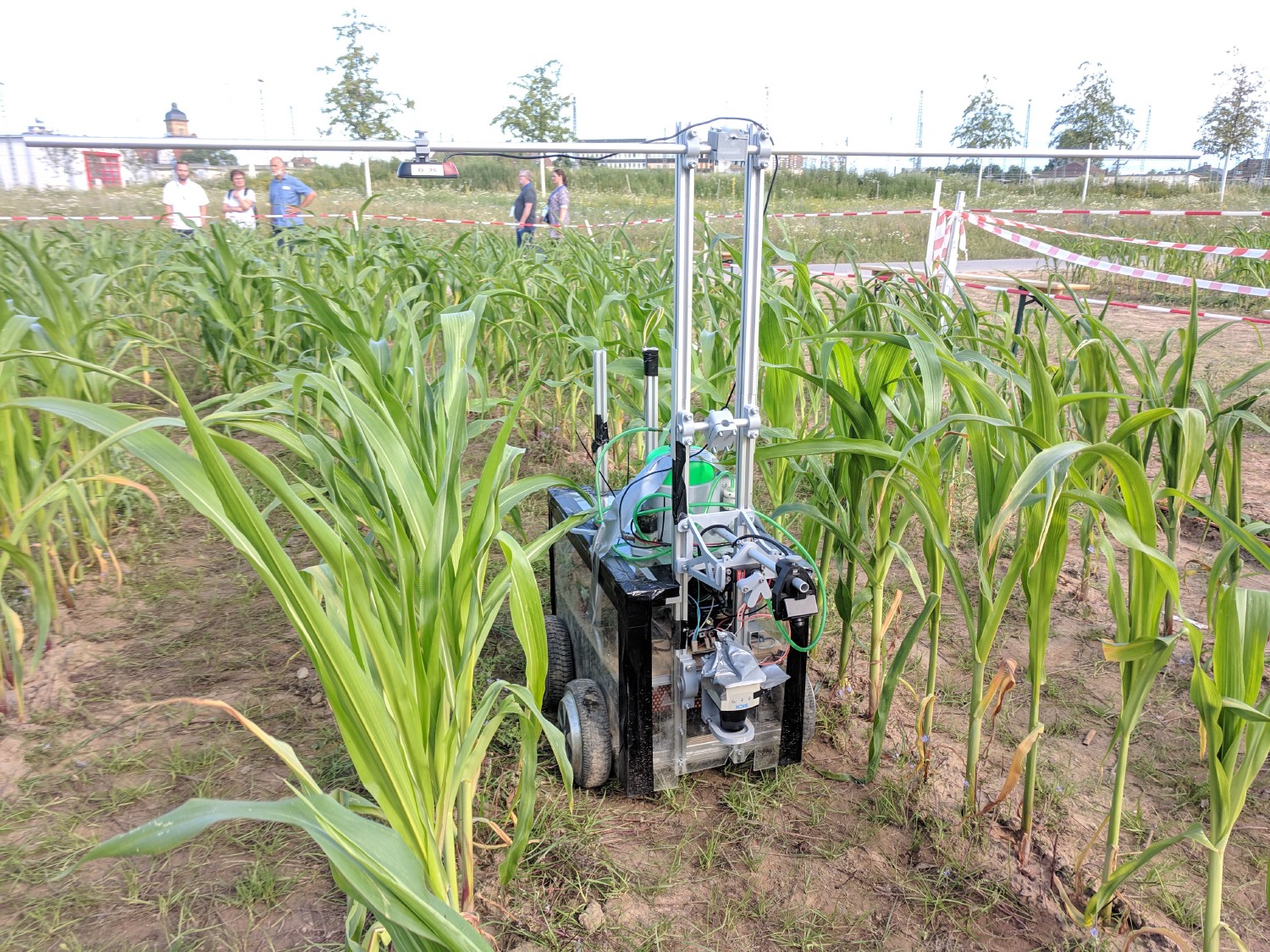
Kamaro participated in the 2019 Field Robot Event and came out in fourth place in the overall ranking, as well as second in the third task (weed detection). This year’s robot was the newly constructed model Dschubba, which utilizes hoverboard wheels and uses a differential steering. Below is a video of our freestyle task, demonstrating deep-learning based selective fertilizing on a mixed-culture field.
Einführung für neue Mitglieder / Introduction for new members
Wir möchten alle Interessierten herzlich zu unseren Einführungsabend am 02.11.2017 um 19:30 Uhr im Gebäude 70.04 am Campus Ost einladen. Hier werden wir Euch nochmal kurz unsere Hochschulgruppe mit den einzelnen Teams und Aufgabenbereichen vorstellen. Im Anschluss wollen wir auch direkt mit dem Einstiegsprojekt starten.
NDVI Mapping with the RealSense R200
A typical task in modern farming is the measurement of the state of plants. The Normalised Difference Vegetation Index is an index commonly used to determine plant health. It is defined as following: (NIR-Red) / (NIR+Red) Healthy plants have a NDVI value near one, vegetation free areas have a value near or below 0. The RealSense R200 is the first affordable, outdoor usable 3d camera. It has two NIR sensors for disparity calculation and one RGB sensor.

Precise localisation with loop closures using graph SLAM
The graph SLAM (Simultaneous Localisation And Mapping) algorithm plays a key role in our attempts to navigate autonomously in complex environments.
Take an in-depth look at how it works.
Why graph SLAM is important? How does it roughly work? What are loop closures and why you need them? That and more is answered here with open source code.