Luna
Luna
In the last few years, mobile biologically inspired robots has become an increasingly popular field with companies such as unitree producing low-cost robots competitive with previous wheeled designs. This surge has been enabled in part by the increasing employment of machine learning, specifically combined with GPU-based simulation. In an interesting new developement, a series of low-cost but high-performance actuators has been released be the company Xiaomi and now continued by the startup Robstride Dynamics. Even though we have always been a student club focussed on wheeled designs mostly, we wanted to try to create a mobile robot using these new technologies to prepare our members for a quickly developing new robotics ecosystem that has not broadly reached regular channels of education yet.
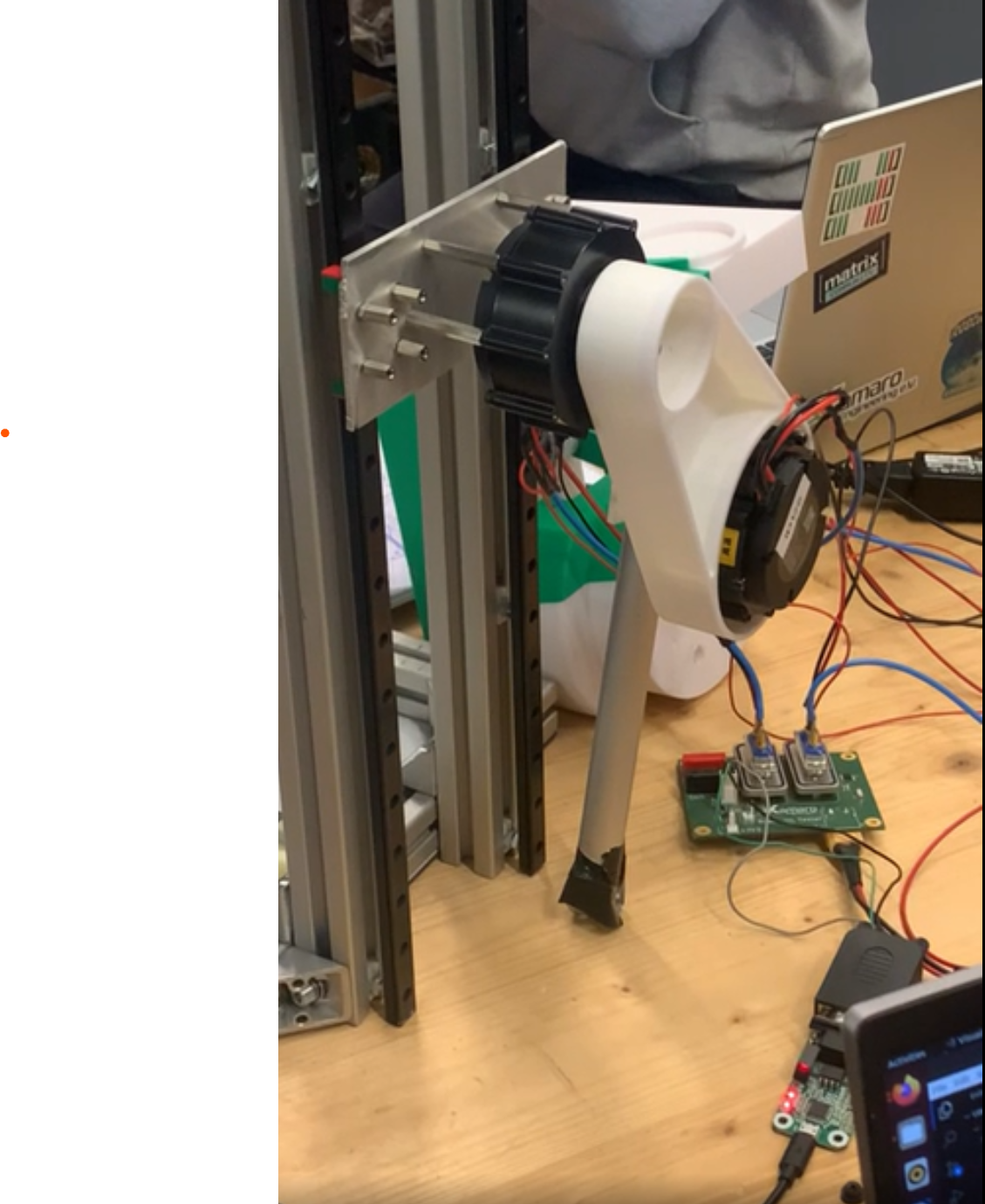
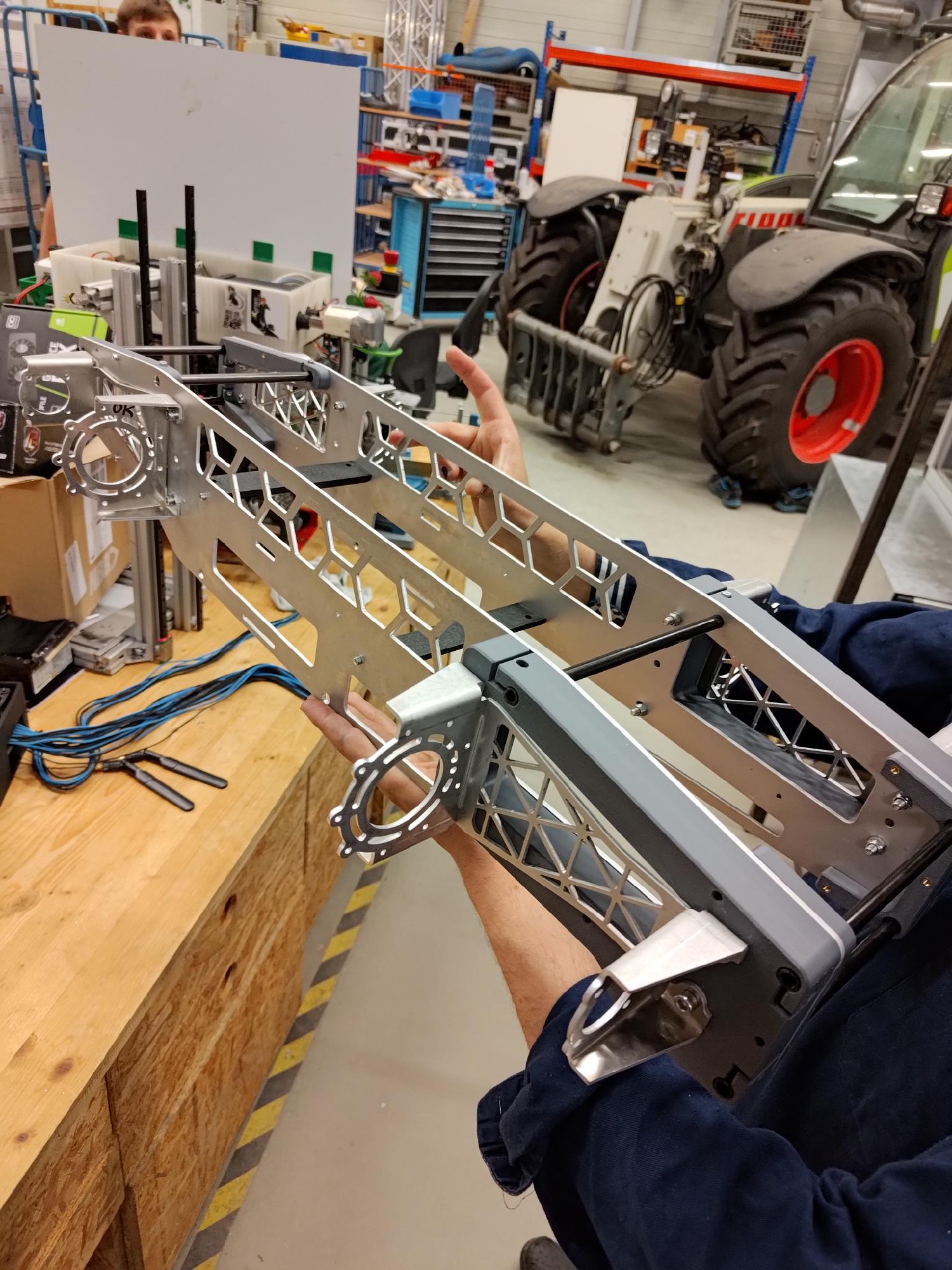
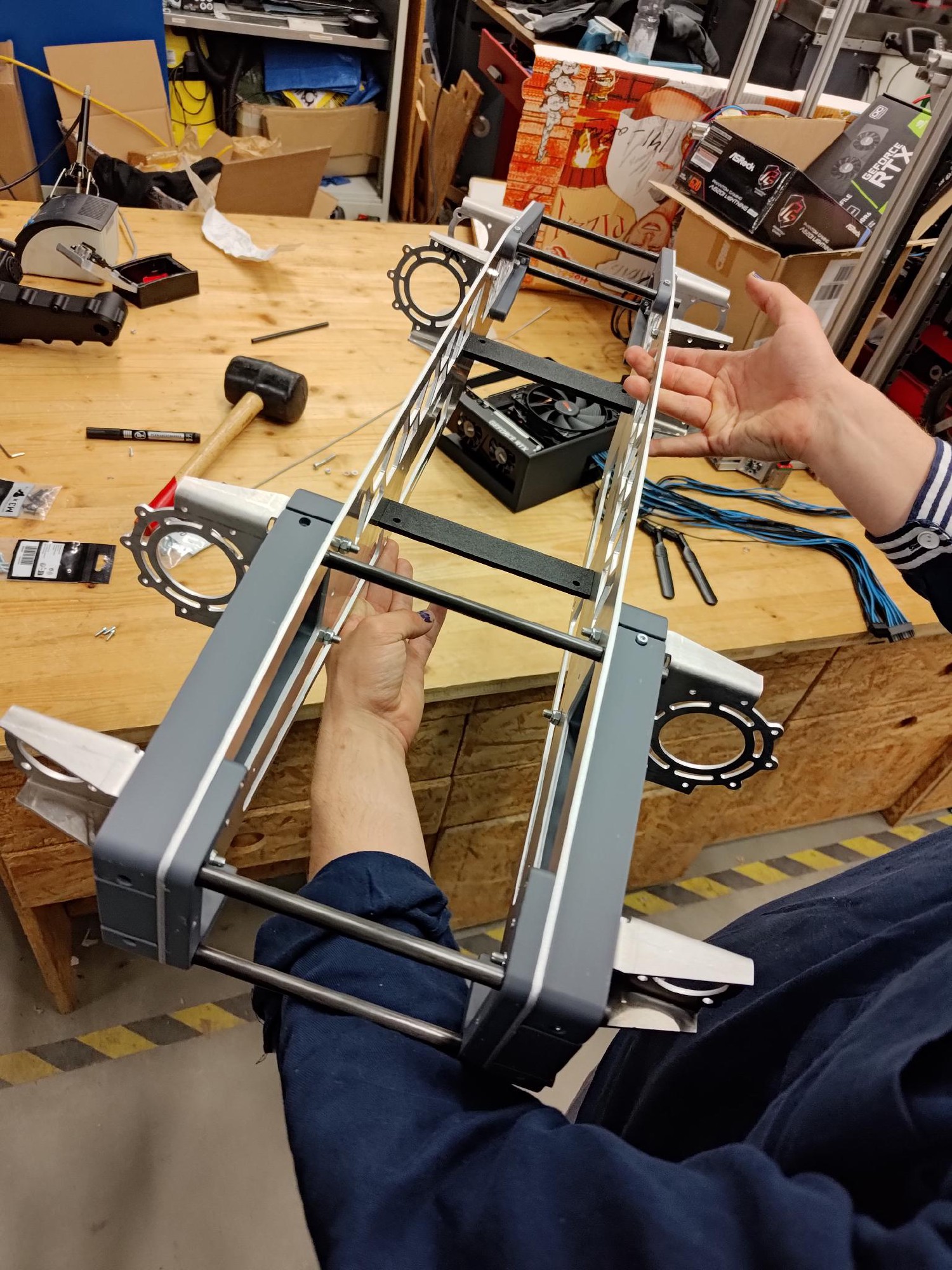
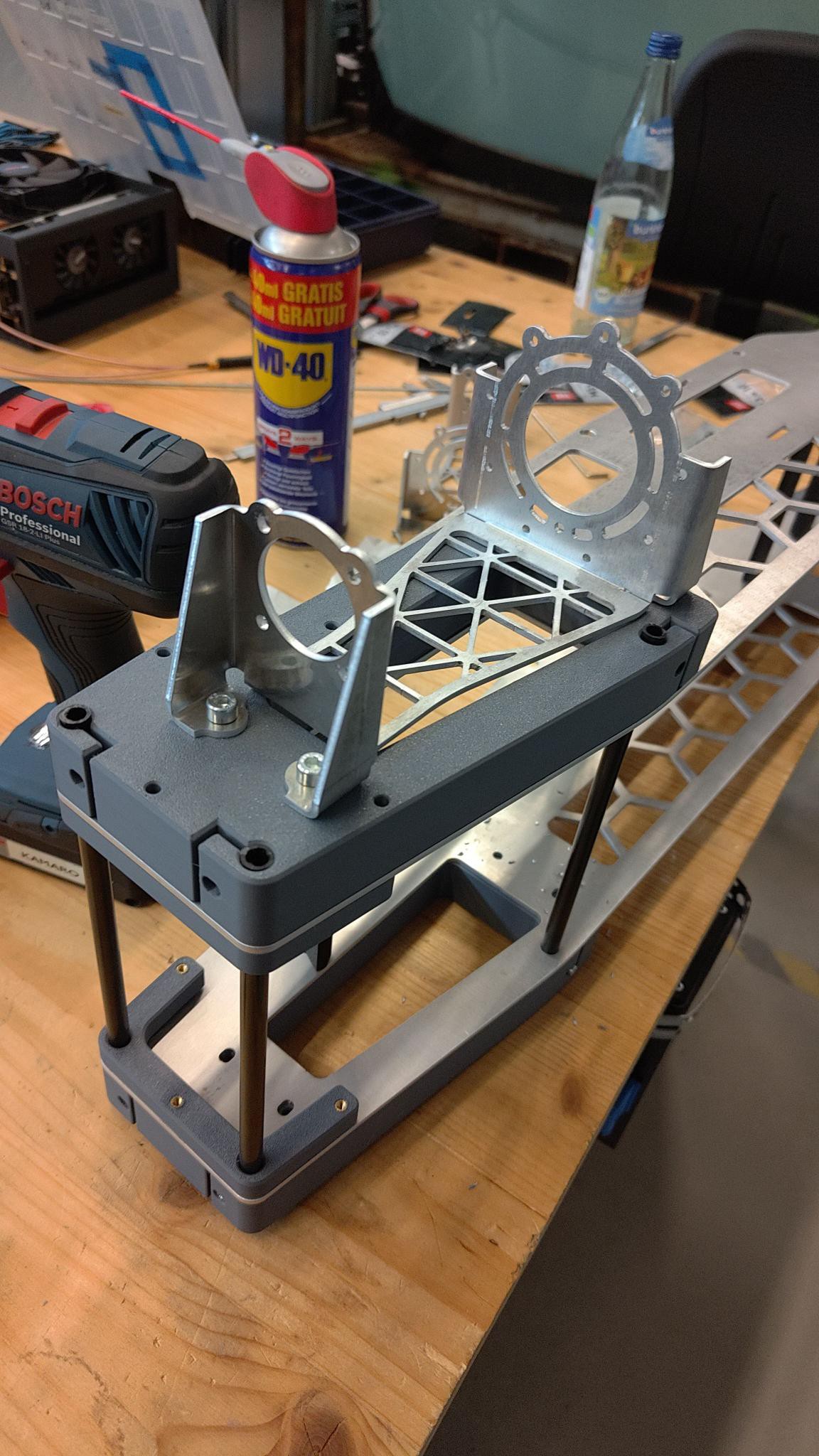
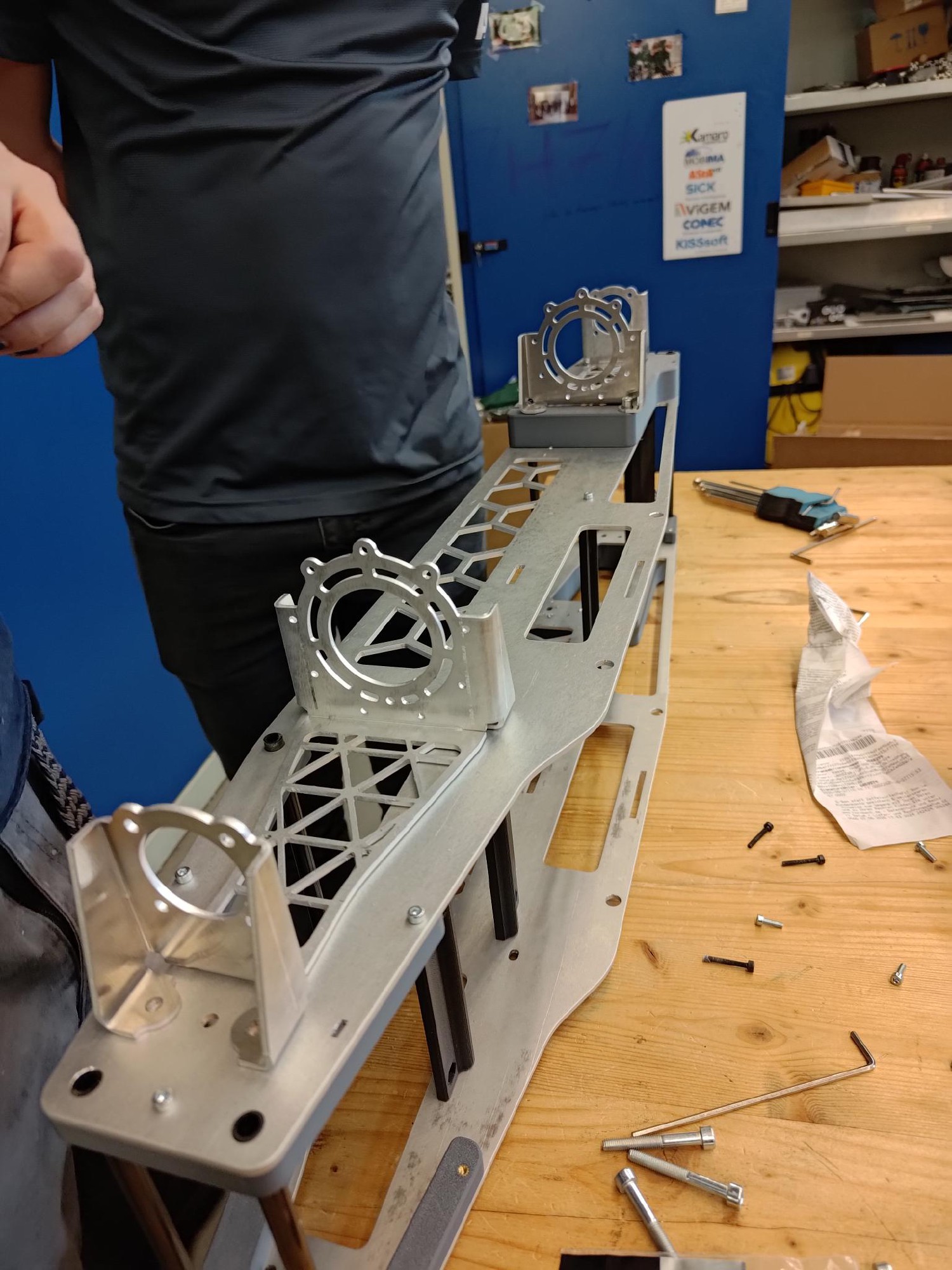
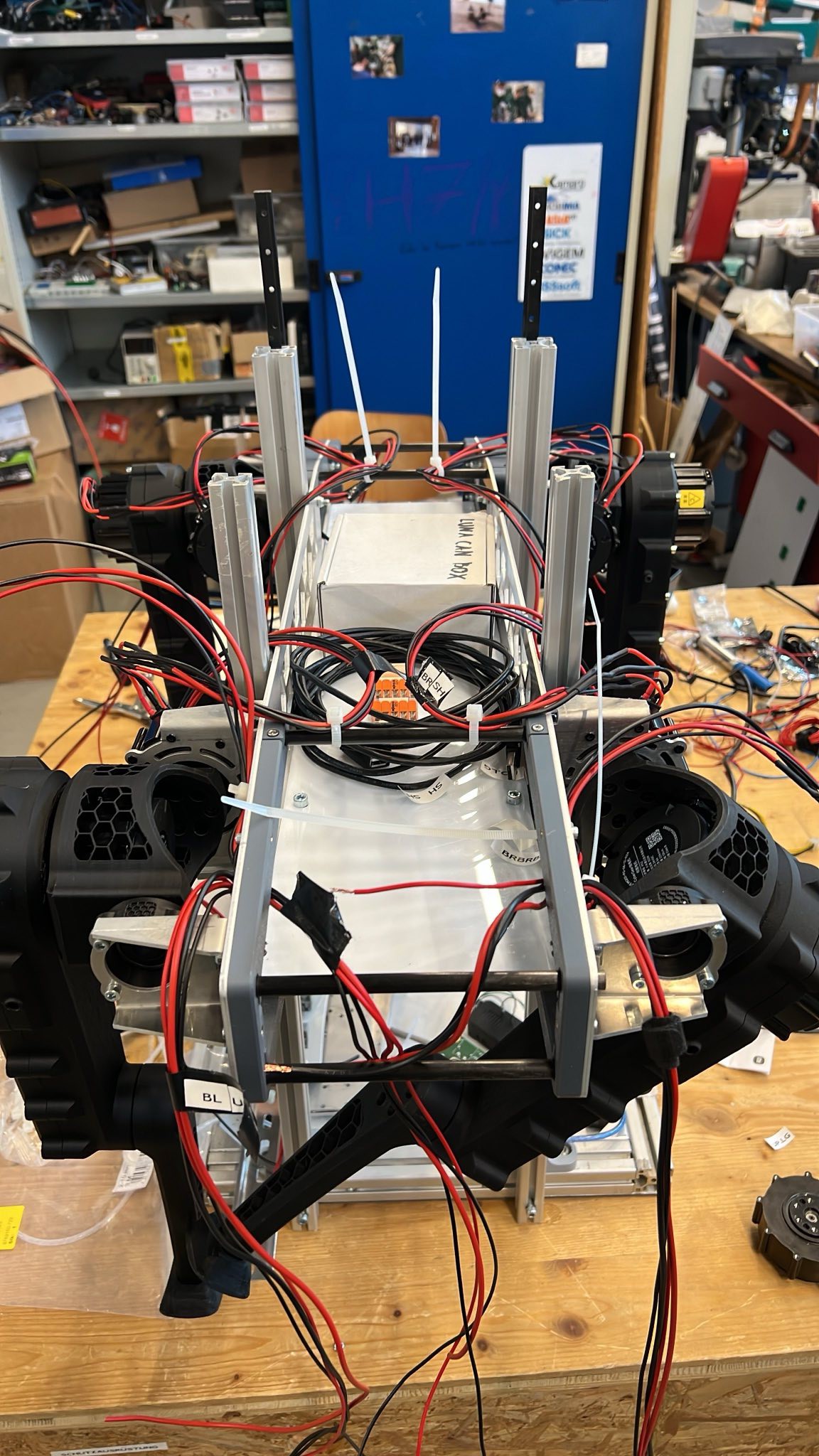
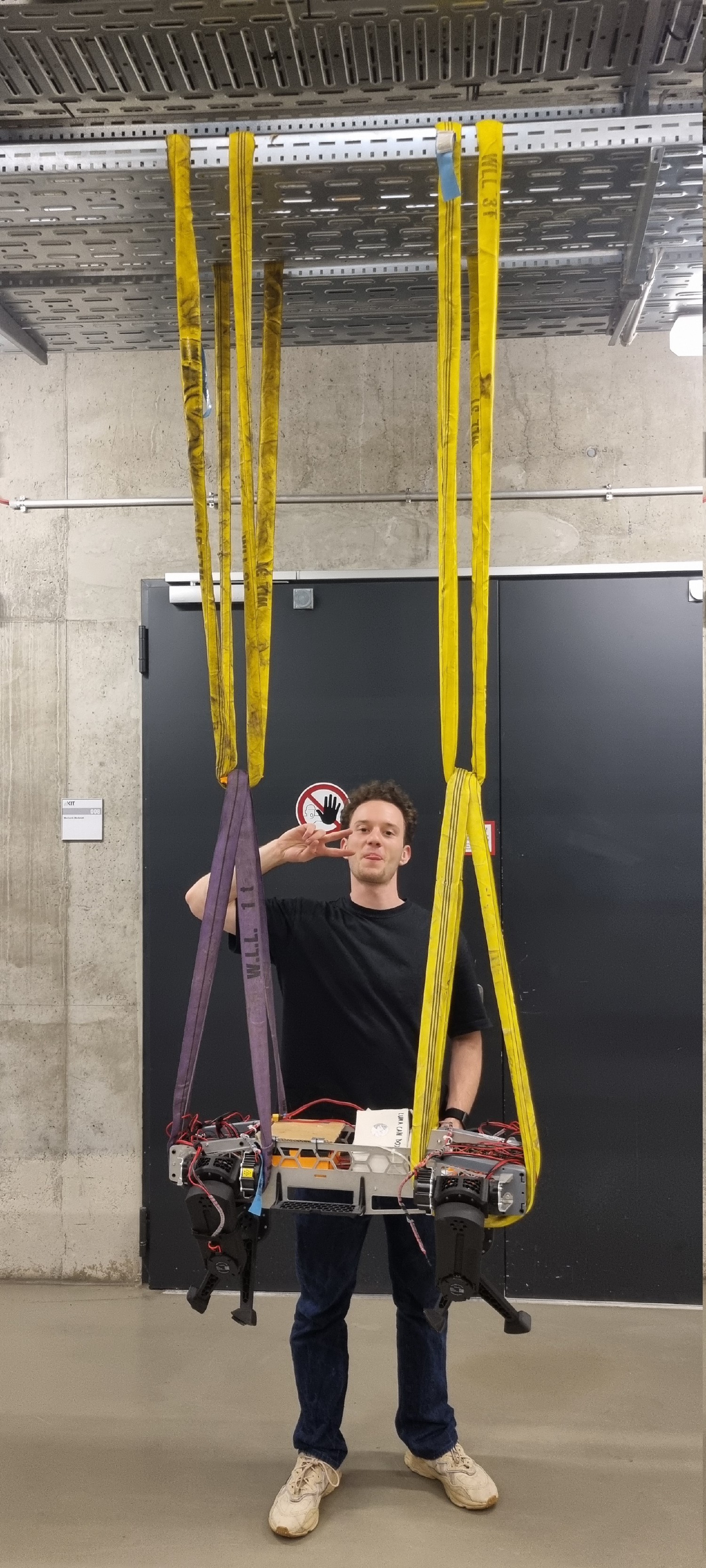
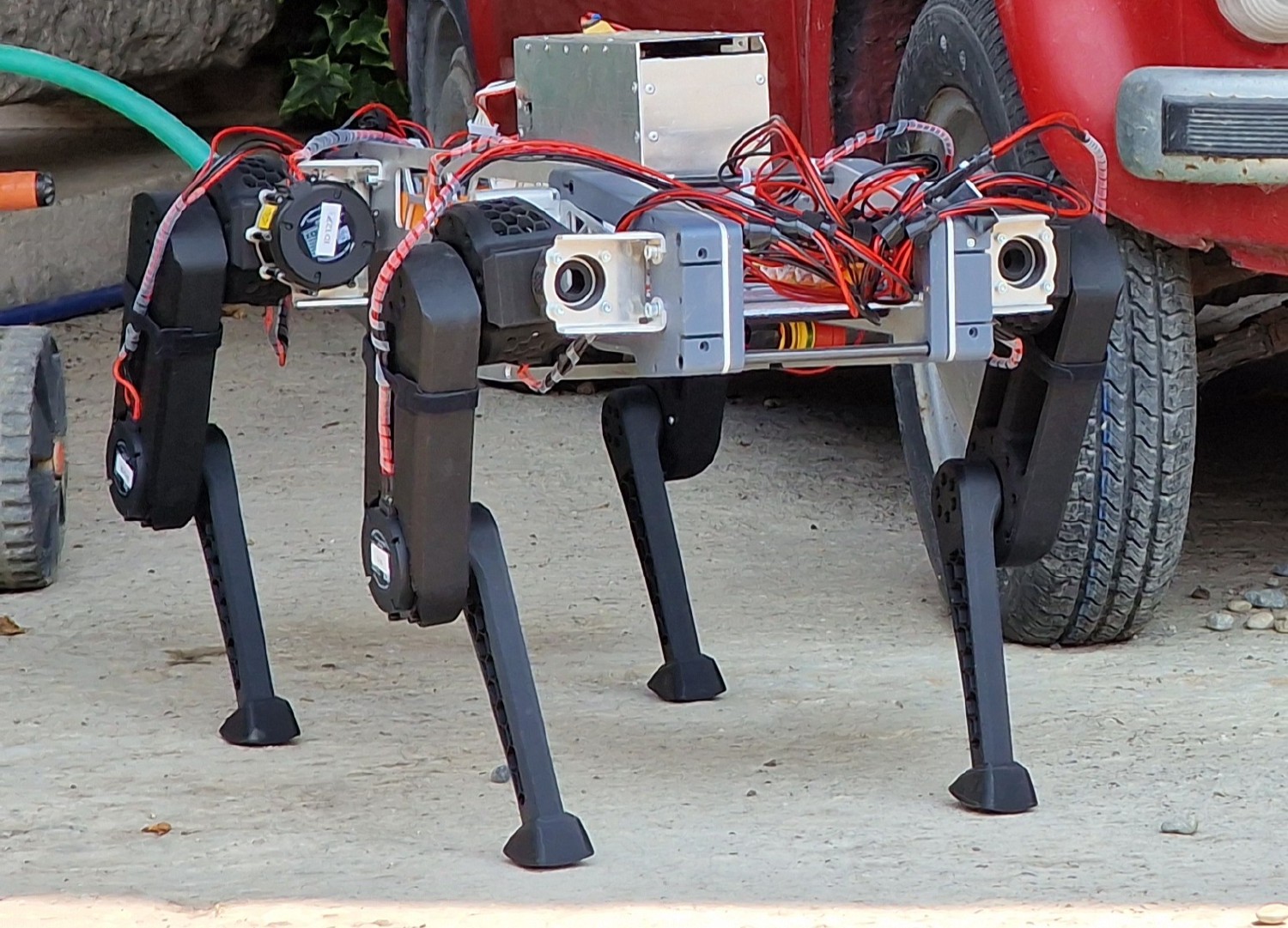
In November of 2024 we began design and developement of the robot “Luna”, made from low-cost 3D printed and laser-cut sheet metal parts. In May of 2025 the basic actuator platform was already complete and we were able to showcase a simple pattern-based controller at our yearly challenge, the Field Robot Event 2025 in Milano. Now we have multiple members working on developing different control strategies to allow for a robust locomotion and application of mobile robotics in agricultural robotics. This kind of project is (to our knowledge) unique in the field, with agricultural robots using wheeled designs. There are however benefits to legged designs, including a reduced degree of ground compaction and the ability to step over shallow plants like strawberries, eliminating the need to adhere to plowed paths in the crop field. We warmly welcome any support, financially, in products or in collaboration that companies or members of the public might have to offer us.