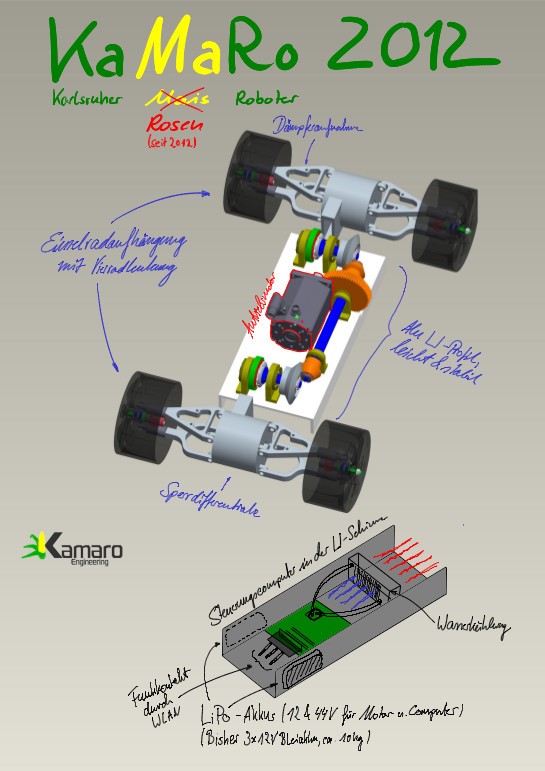
Nachdem sich im Laufe der Zeit bei unserem ersten Roboter Kamaro 2010 herausgestellt hat, dass Mechanik und Elektronik nicht für den langfristigen Einsatz geeignet waren haben wir mit der Entwicklung noch mal von vorne begonnen.
Über die Verbesserung jedes Punktes und Anforderungen künftiger Einsätze haben wir uns während der Konzeptionsphase umfangreiche Gedanken gemacht. Der Roboter Beteigeuze hat nach drei Jahren Konzeption, Entwicklung, Konstruktion und Erprobung seinen ersten Sieg bei der
Robotour 2015 eingefahren. Nichtsdestotrotz machen wir weiterhin konstruktive Anpassungen auch für andere Wettbewerbe. Im Sommer 2015 konnten wir uns nach zahlreichen Verbesserungen an Mechanik und Elektrotechnik zum ersten Mal voll auf die Software konzentrieren.
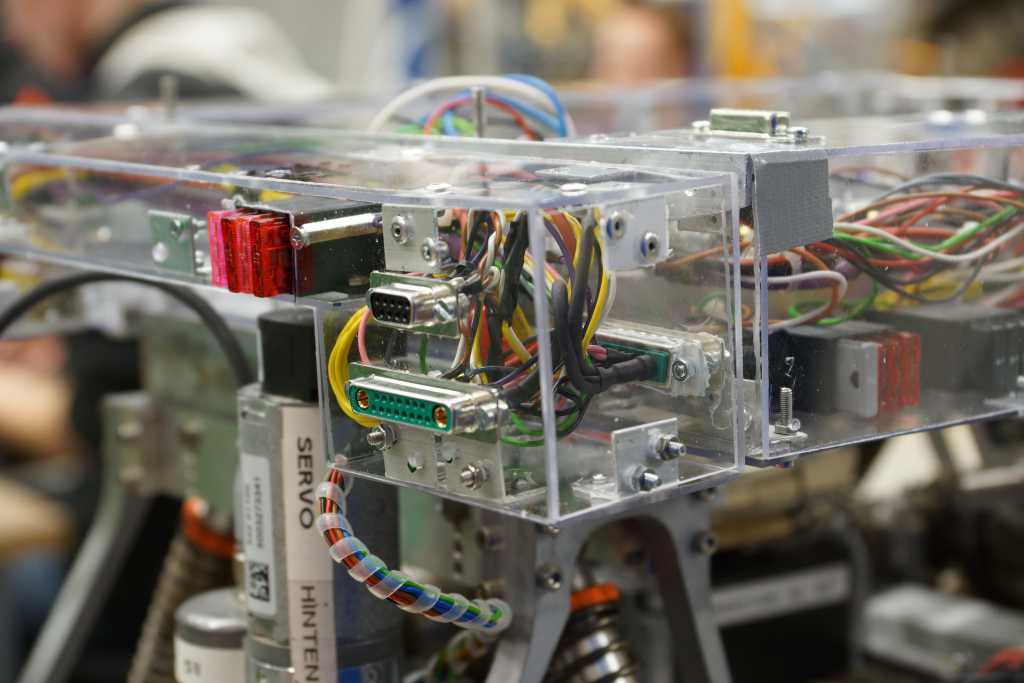
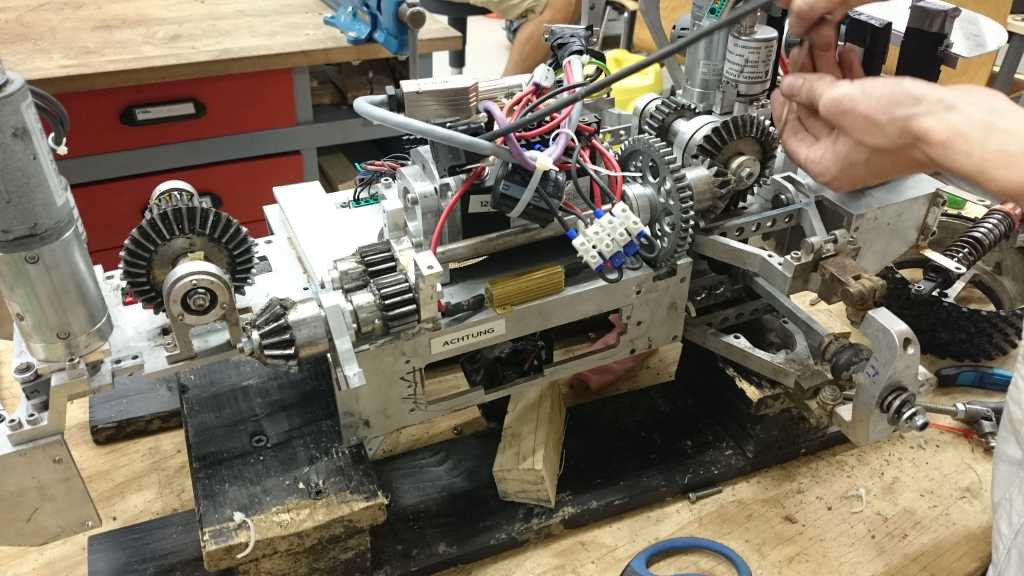
2019 und 2020 haben wir die Elektrotechnik basierend auf einer echtzeitfähigen Middleware —
RODOS — neu aufgebaut. Ein neu entwickelter Kabelbaum stellt zwei Arrays von baugleichen Steckverbindern bereit, an denen wir Module anschließen. Weiterhin entkoppelt die Middleware unsere Software von der Hardware, auf der sie aufbaut. Damit können wir alte Platinen mit neuen ersetzen, Module neuprogrammieren, ohne bestehende ändern zu müssen und somit die Elektronik stetig verbessern.
The graph SLAM (Simultaneous Localisation And Mapping) algorithm plays a key role in our attempts to navigate autonomously in complex environments.
Take an in-depth look at how it works.
Why graph SLAM is important? How does it roughly work? What are loop closures and why you need them? That and more is answered here with open source code.
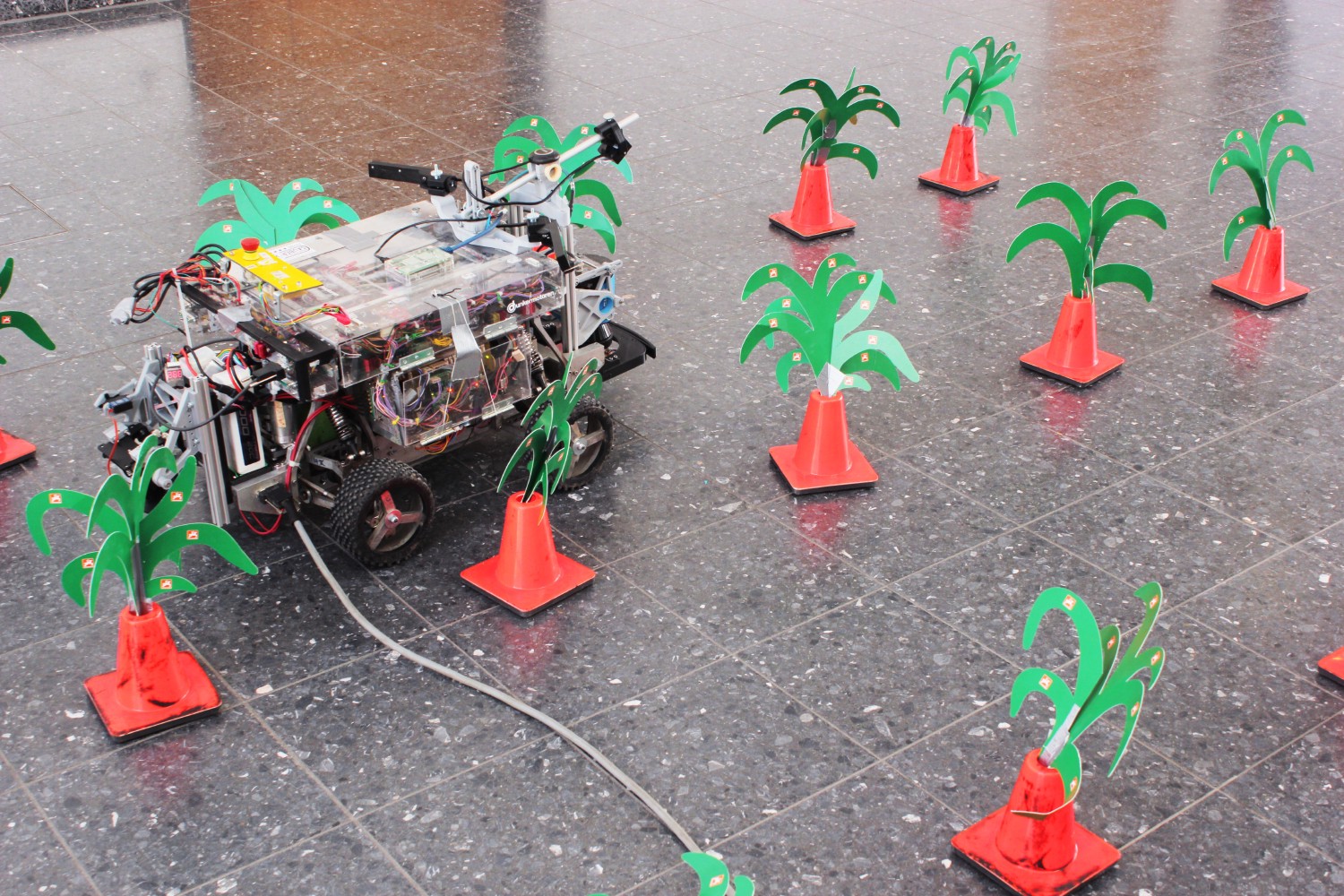
Der SICK robot day wird alle zwei Jahre vom Sensorhersteller SICK ausgerichtet. Er findet in einer Halle statt, die Aufgabe ist aber jedes mal eine andere. Dieses Jahr ging es um den Transport und das Platzieren von Würfeln mit 15 cm Kantenlänge. Es treten jeweils zwei Roboter gegeneinander an.
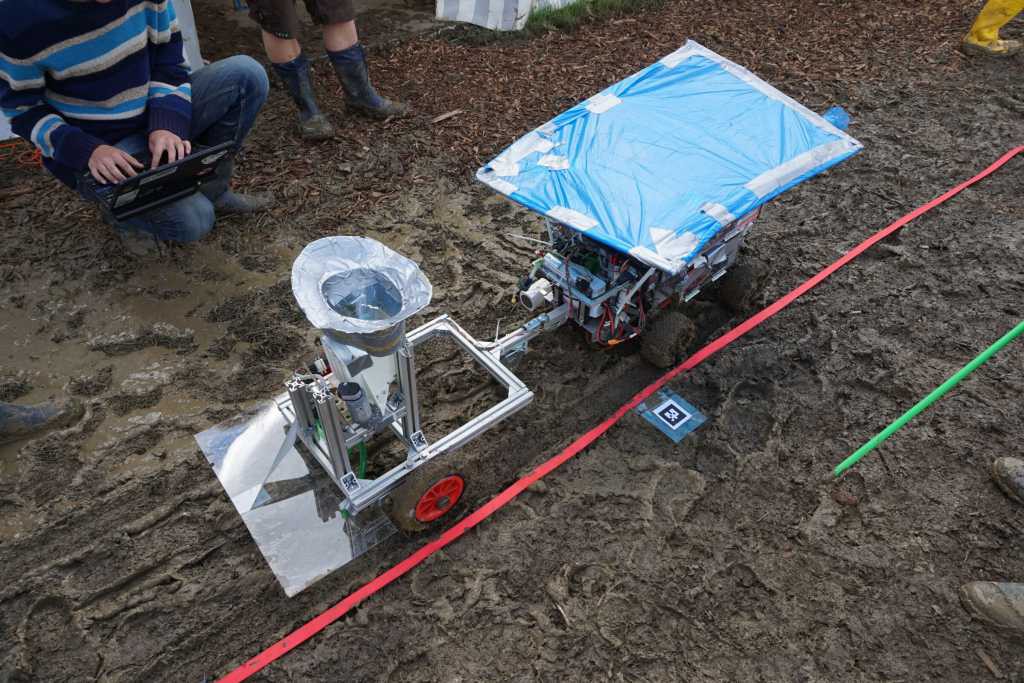
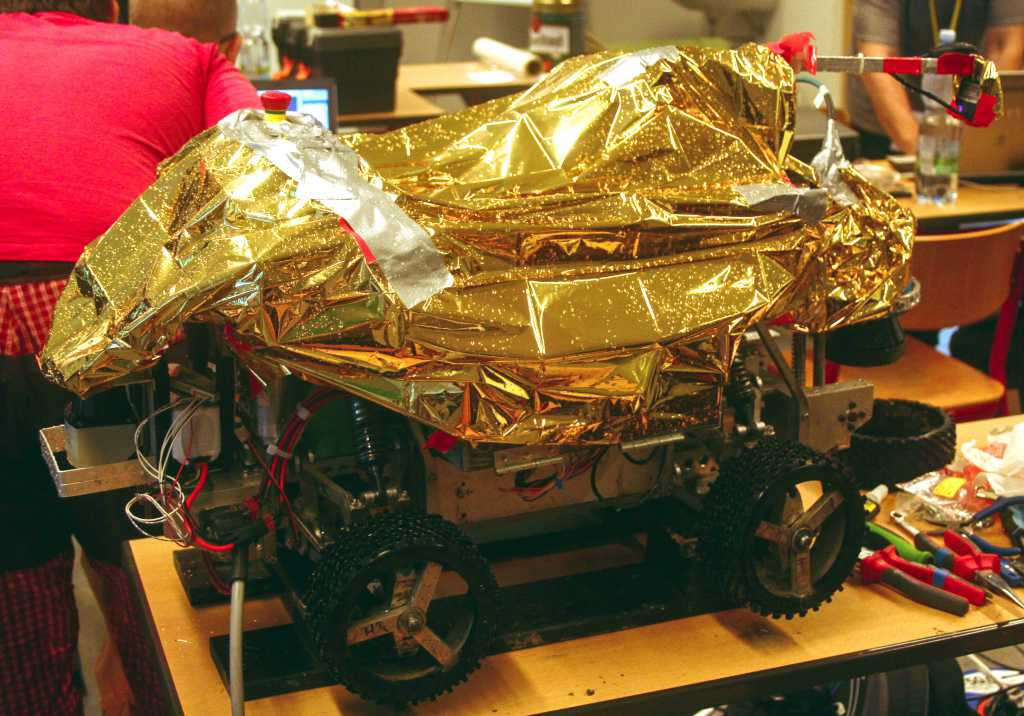
Die Robotour 2016 fand im bayerischen Deggendorf inmitten von ausdauerndem Starkregen statt. Unser Team kämpfte mit Goldfolie, Duct-Tape und Regenschirm gegen das Wetter und mit Kabelbindern und Akkuschraubern gegen die technischen Defekte.
Die KIT-Kinder-Uni ist längst eine Institution. Wenn im Sommer Ruhe in den Hörsälen einkehrt und die fleißigen Studenten sich zum lernen zurückziehen, übernehmen die Nachwuchsforscher den Campus.
Auf dem Kindercampus können Kinder an Experimenten teilnehmen und Vorlesungen besuchen. Wissenschaft zum anfassen!
Auch Kamaro beteiligte sich in diesem Jahr mit einer Fahrdemonstration und vielen anschaulichen Erklärungen der komplizierten Robotertechnik. Wieder einmal zeigte sich, das die Faszination für Maschinen, die sich ganz plötzlich, wie von Geisterhand, in Bewegung setzen, keine Altersgrenzen kennt.
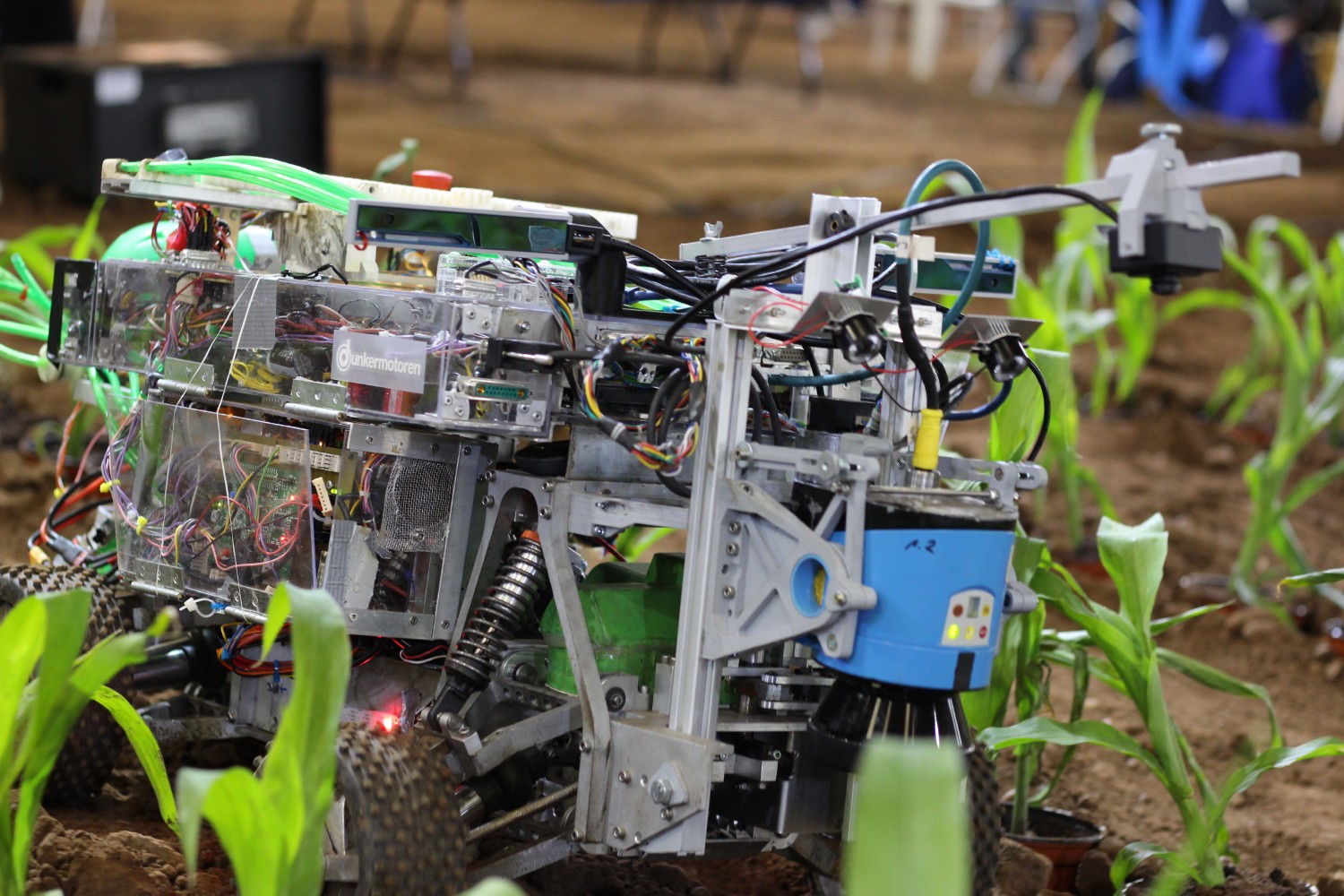
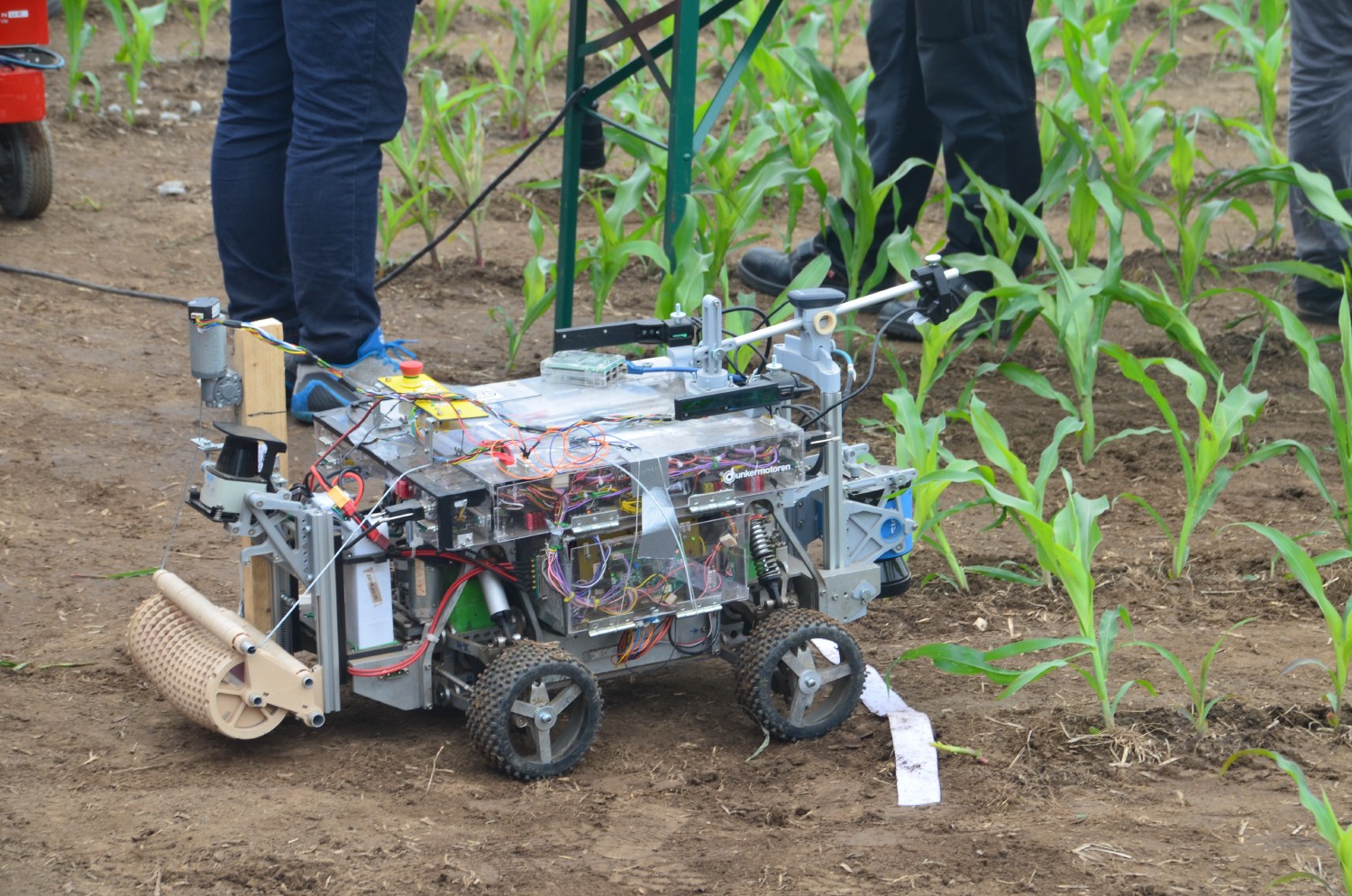
Das Field Robot Event 2016 endete wie es begann: in tiefem Schlamm. Vom 13. - 16.Juni 2016 versammelten sich im fränkischen Haßfurt wieder Roboterteams aus ganz Europa, um unter sich den besten der autonomen Feldroboter zu ermitteln.
Wie schon im Jahr 2014 fand das Field Robot Event, die inoffizielle Weltmeisterschaft für autonome Feldroboter, im Rahmen der DLG-Feldtage statt. Der wochenlange, teils heftige Regen über Teilen Deutschlands hatte auch am Veranstaltungsort der DLG-Feldtage, einem Acker beim Gut Mariaburghausen bei Haßfurt, seine Spuren hinterlassen.
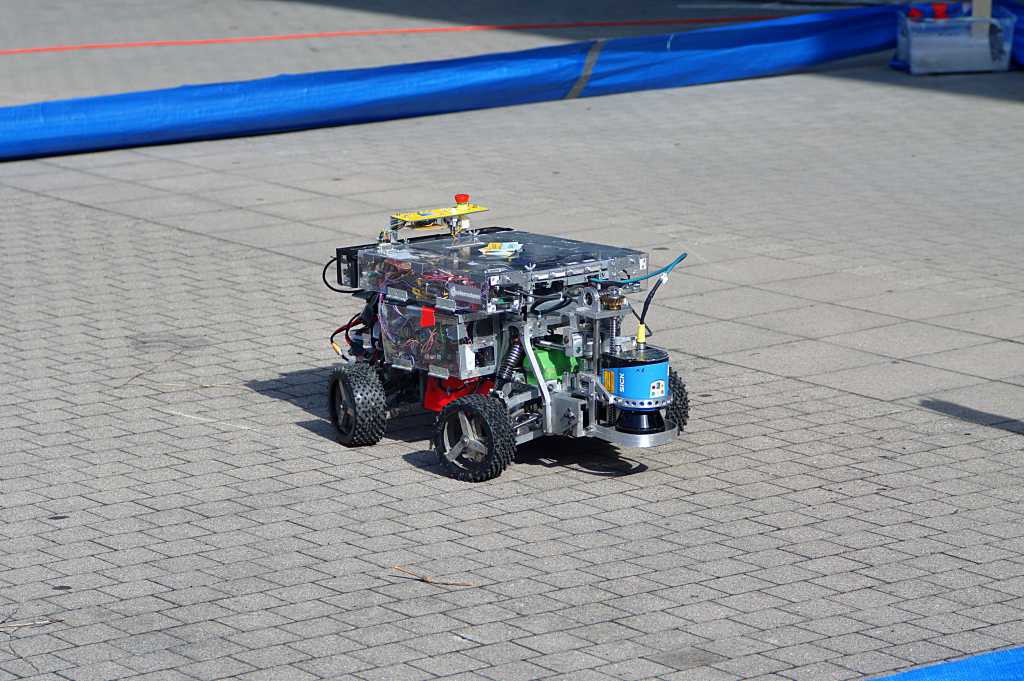
Bei der Robotour 2015 musste Beteigeuze autonom eine Route von A nach B durch eine Stadt planen und dieser dann, durch enge Gassen und vorbei an zahlreichen Hindernissen, folgen.
Die Herausforderung an die Roboter konnte Beteigeuze besser als die gesamte Konkurrenz meistern und so den 1. Platz belegen. Die Skills, die Beteigeuze den Sieg einbrachten, werden im folgenden genauer beleuchtet.
Einmal im Jahr feiert das KIT mit Mitarbeitern, Gästen aus Wirtschaft, Forschung und Politik und einigen studentischen Beiträgen seinen Geburtstag.
Kamaro ist es gelungen, mit einem interaktiven Lounge-Konzept die Veranstalter rund um Frau Baumgartner von der Abteilung Presse, Kommunikation und Marketing des KIT zu überzeugen und so eine der begehrten Ausstellungsflächen zu ergattern. Am Stand waren die Roboter Kamaro 2010 und Beteigeuze sowie ein Ausblick auf das kommende Projekt Kamaro-Next zu sehen. Mit Videos der vergangenen Wettbewerbe und Exponaten aus der aktuellen Entwicklungsarbeit konnten sich die Besucher einen Einblick in die Welt der Robotik verschaffen.
Um eine detaillierte Karte der Umgebung zu erstellen, setzten wir auf einen EKF-SLAM Algorithmus (Extendes Kalman Filter — Simultaneous Localization And Mapping). Die Kartenerstellung mit EKF-SLAM ist eine Möglichkeit für Roboter, die Welt zu sehen. Um zu verstehen was das ist, sollte man jedoch zunächst einige Grundlagen betrachten.
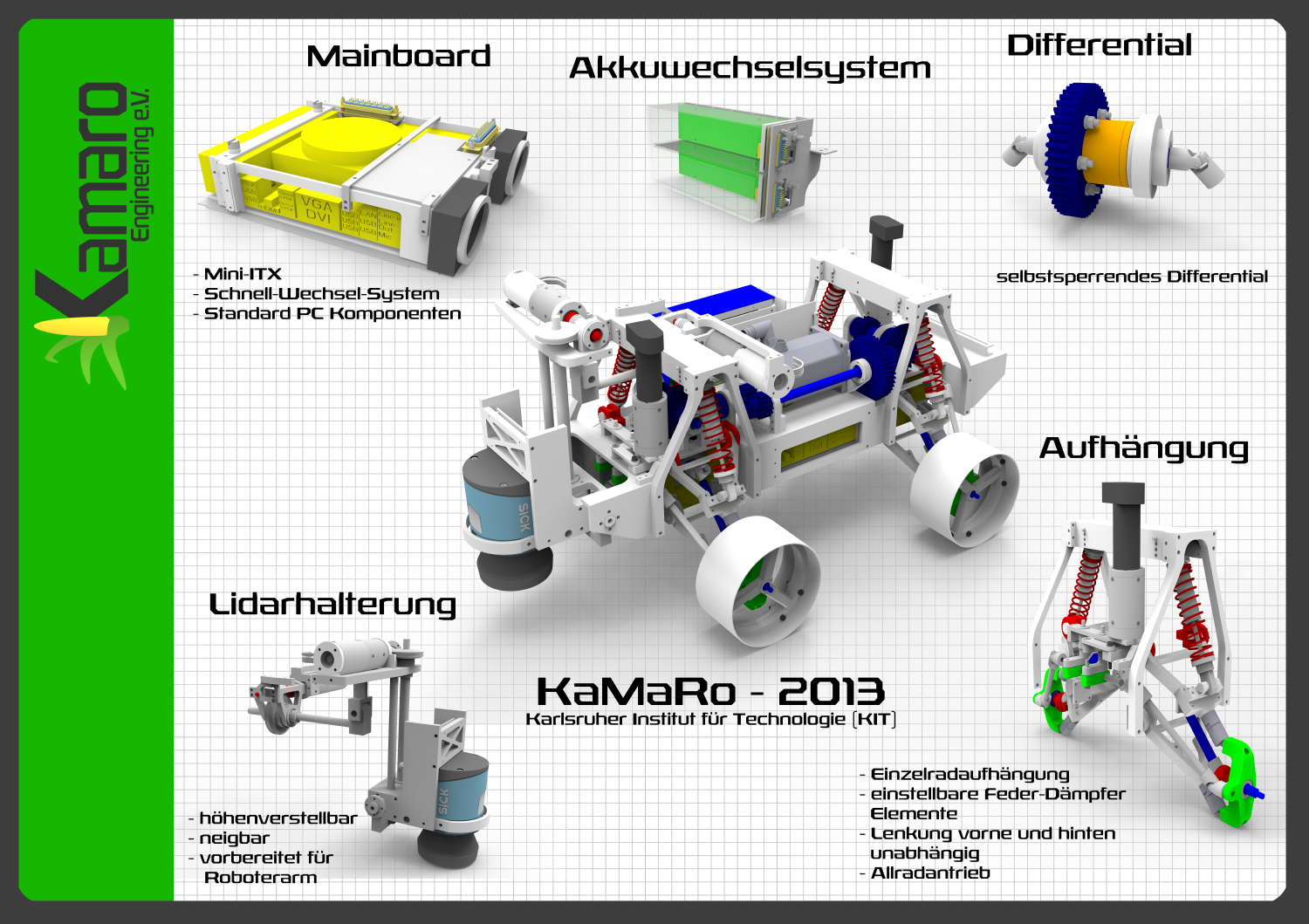
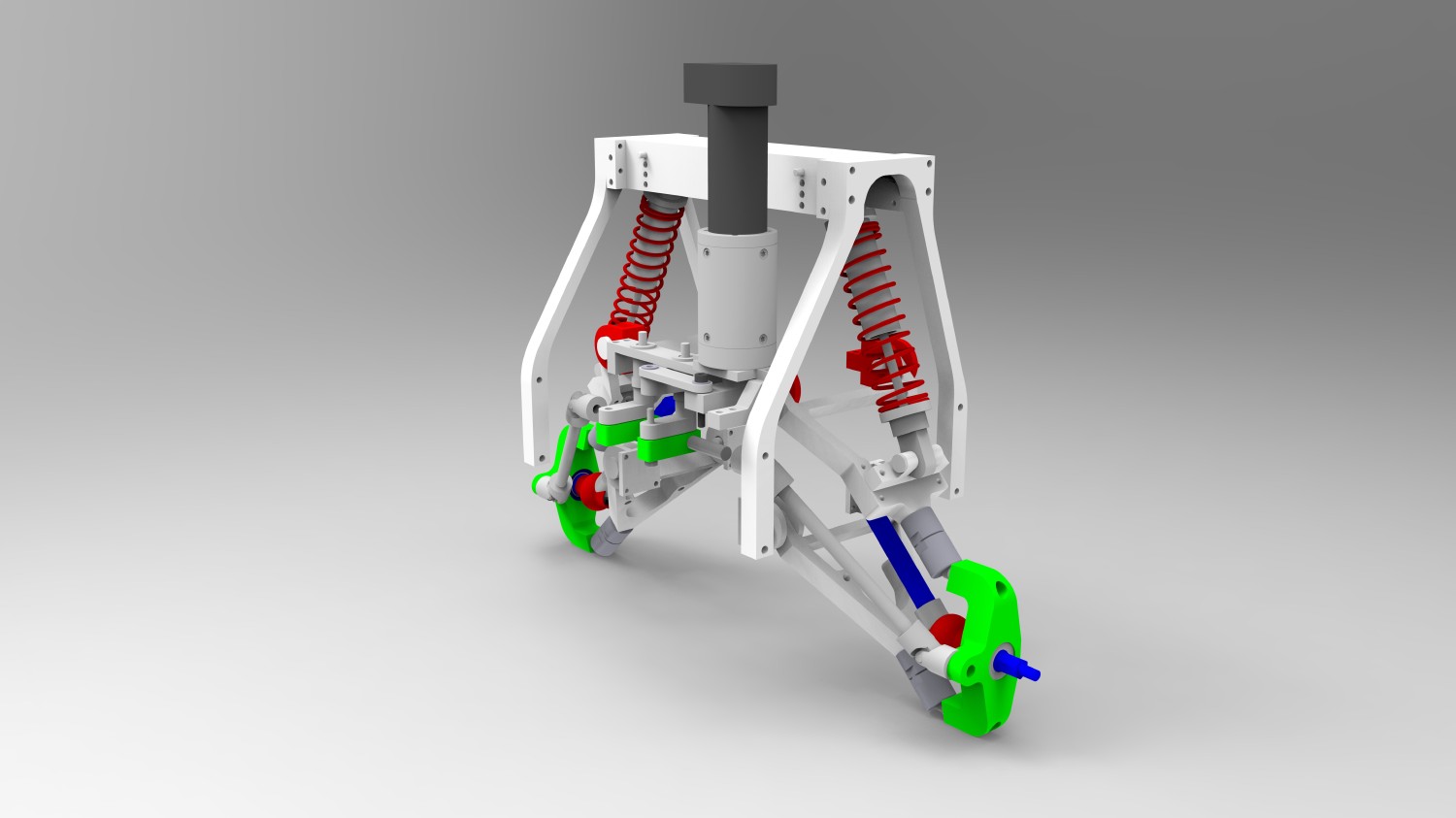
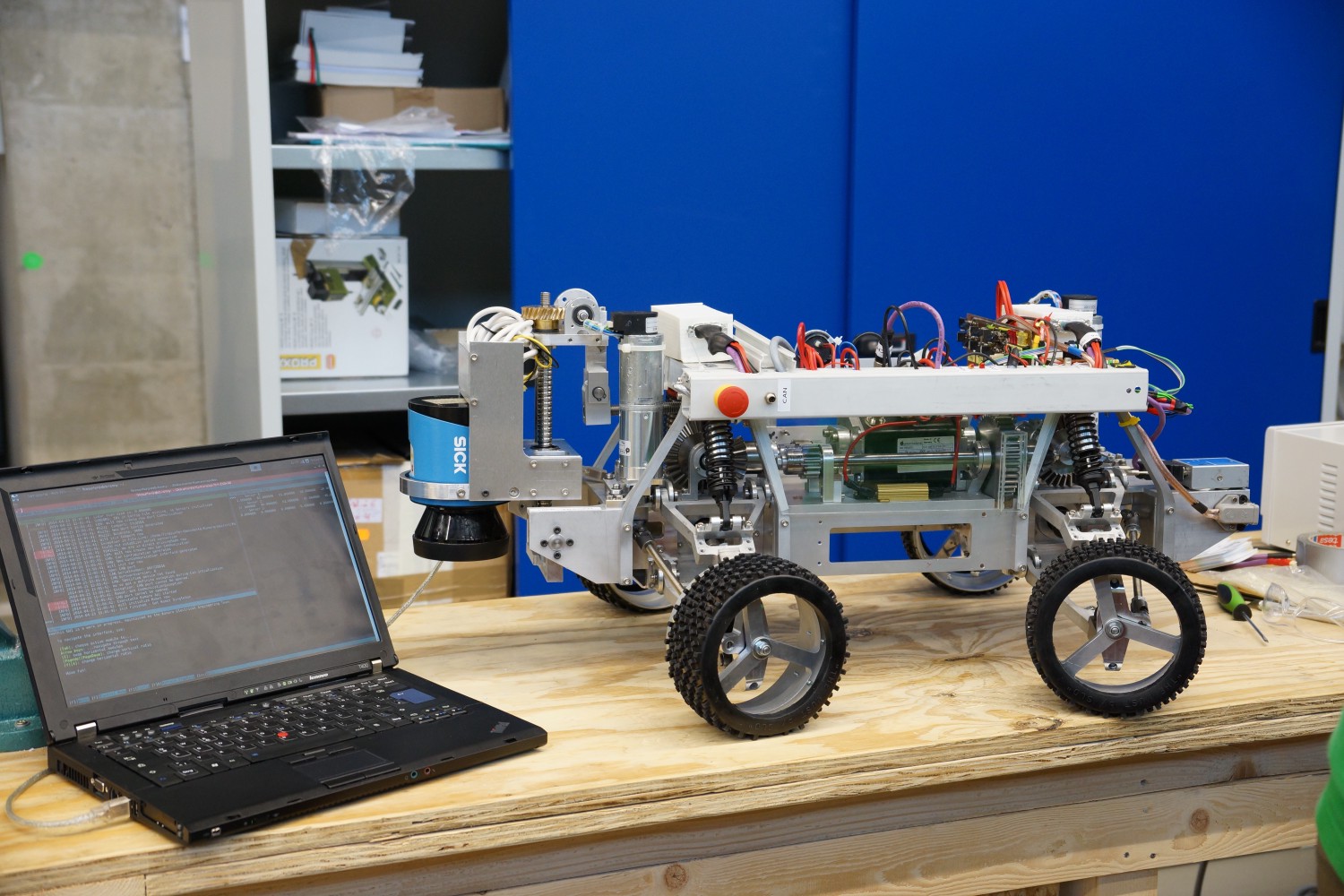
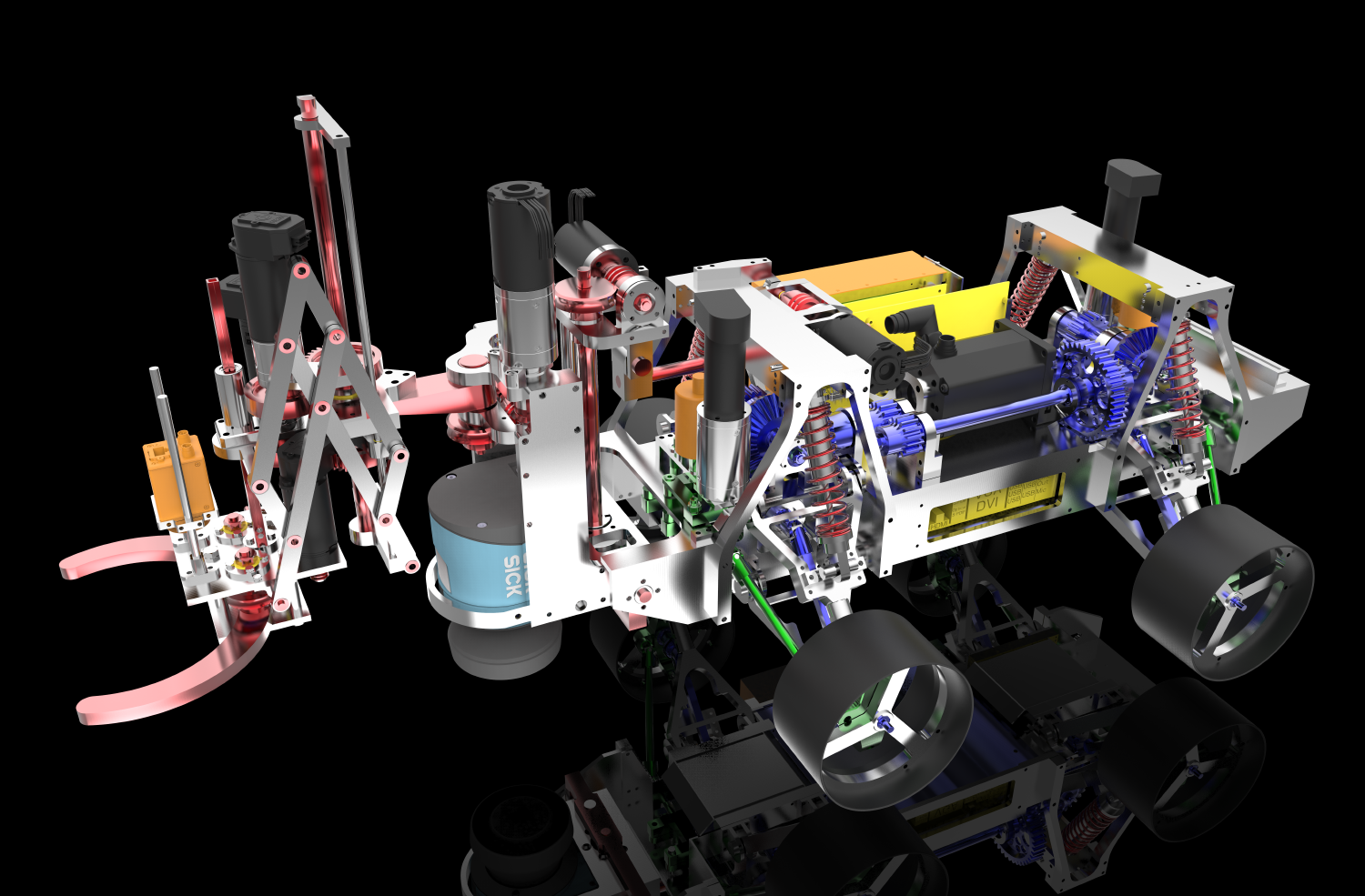
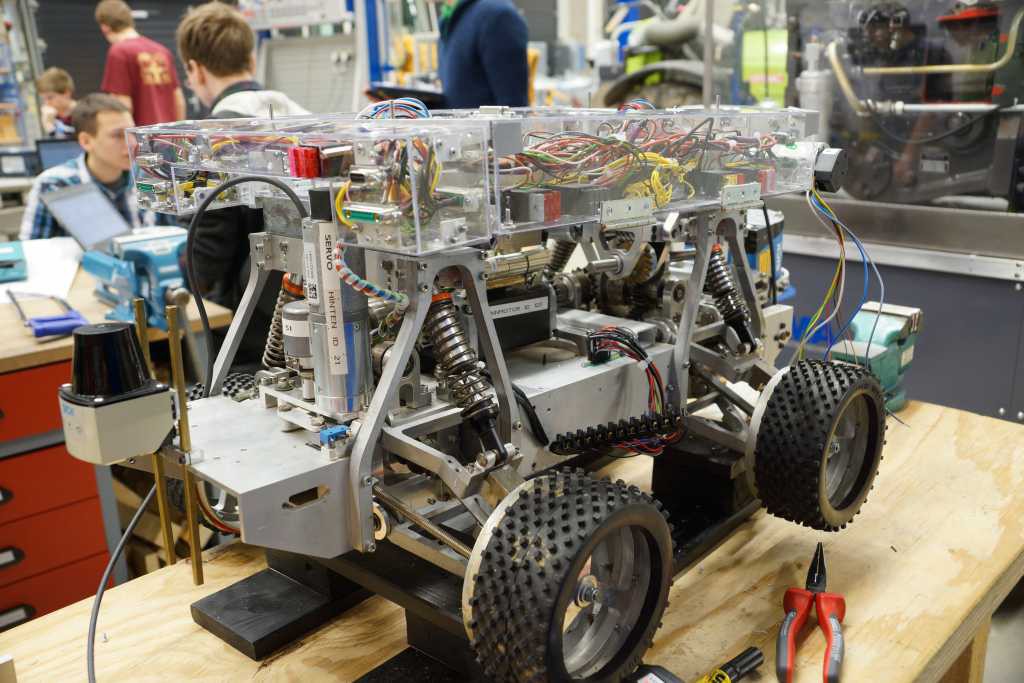
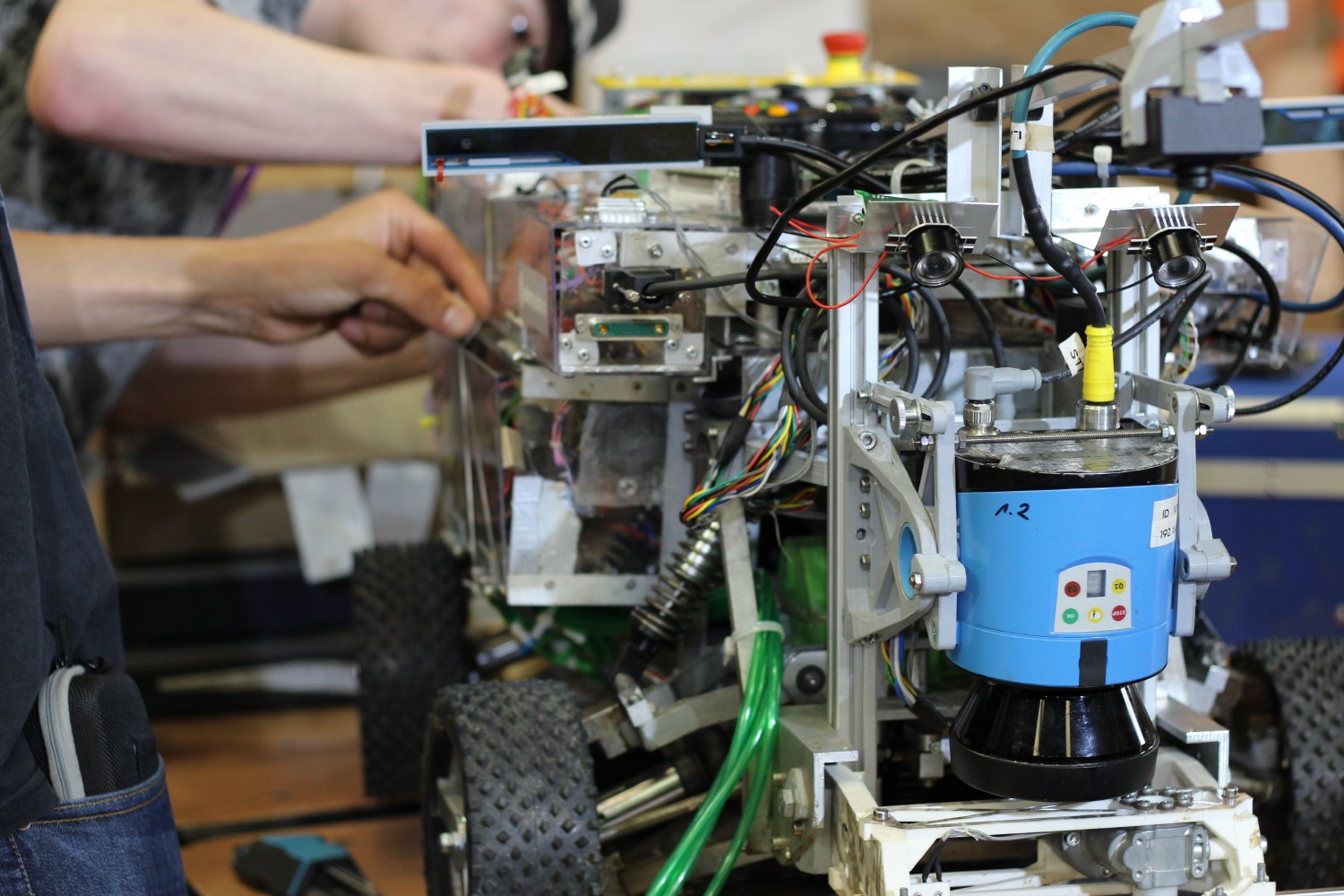
Unser Roboter tastet mit zwei LiDAR-Scannern seine Umgebung 360 ° ab. Mit Hilfe dieser Sensoren können Objekte erkannt und Richtungsentscheidungen getroffen werden. Allerdings kann der Roboter so nicht gezielt navigieren, sondern höchstens Objekten ausweichen. Mit unserem Mapping Algorithmus speichern wir die Daten der Scanner und fügen sie Schritt für Schritt zu einer Karte zusammen. In dieser kann der Roboter sich dann lokalisieren und gezielt zu bestimmten Positionen fahren. Das Erstellen einer Karte einer unbekannten Umgebung unter gleichzeitiger Lokalisierung des Roboters ist eines der großen Probleme in der Robotik. Die Lösungsansätze werden in einer eigenen Klasse - SLAM - zusammengefasst.