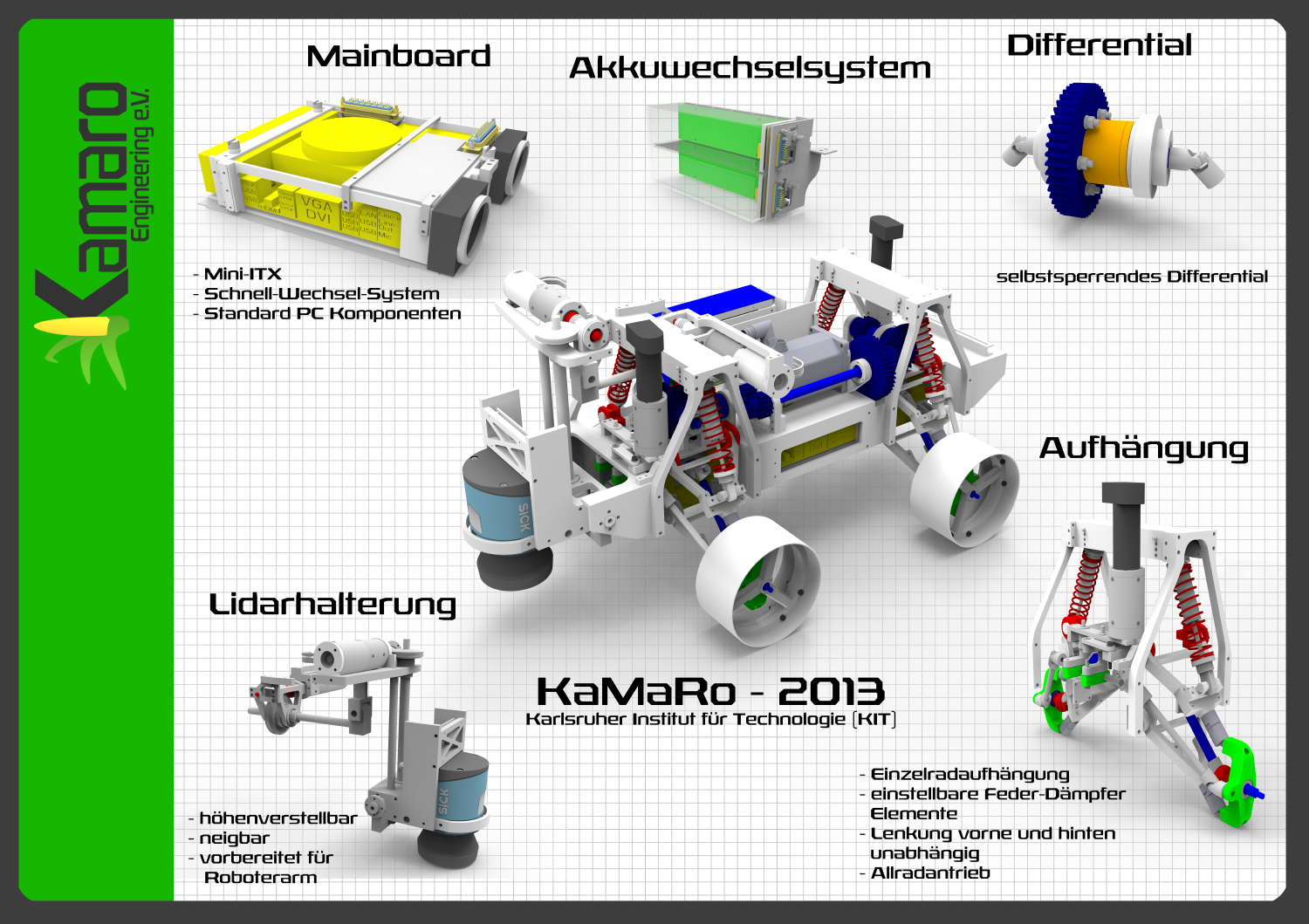
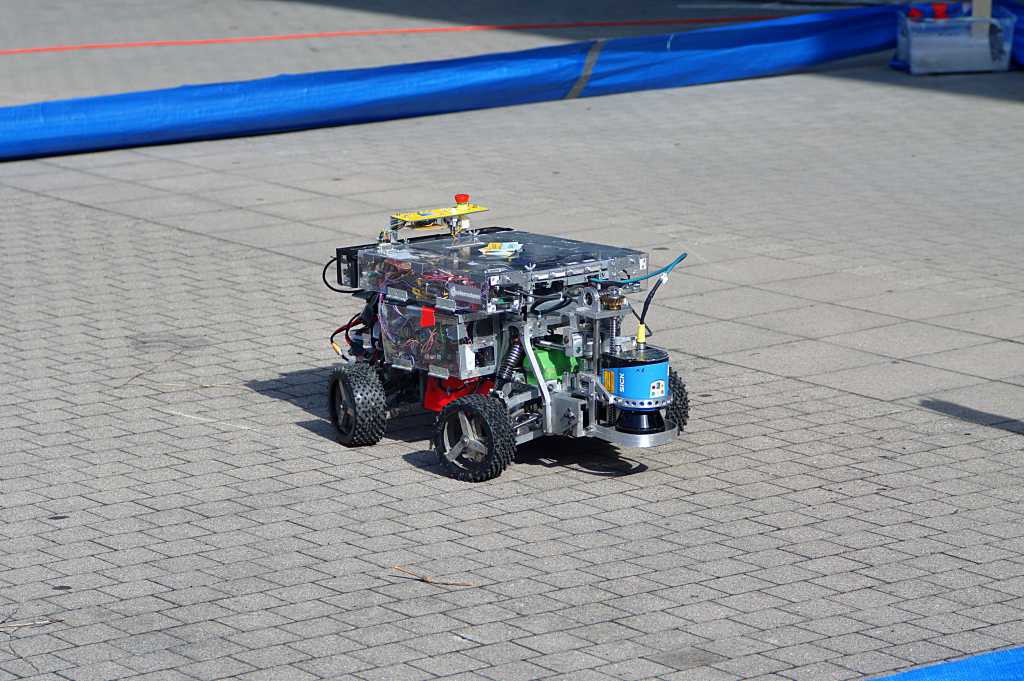
Nachdem sich im Laufe der Zeit bei unserem ersten Roboter Kamaro 2010 herausgestellt hat, dass Mechanik und Elektronik nicht für den langfristigen Einsatz geeignet waren haben wir mit der Entwicklung noch mal von vorne begonnen.
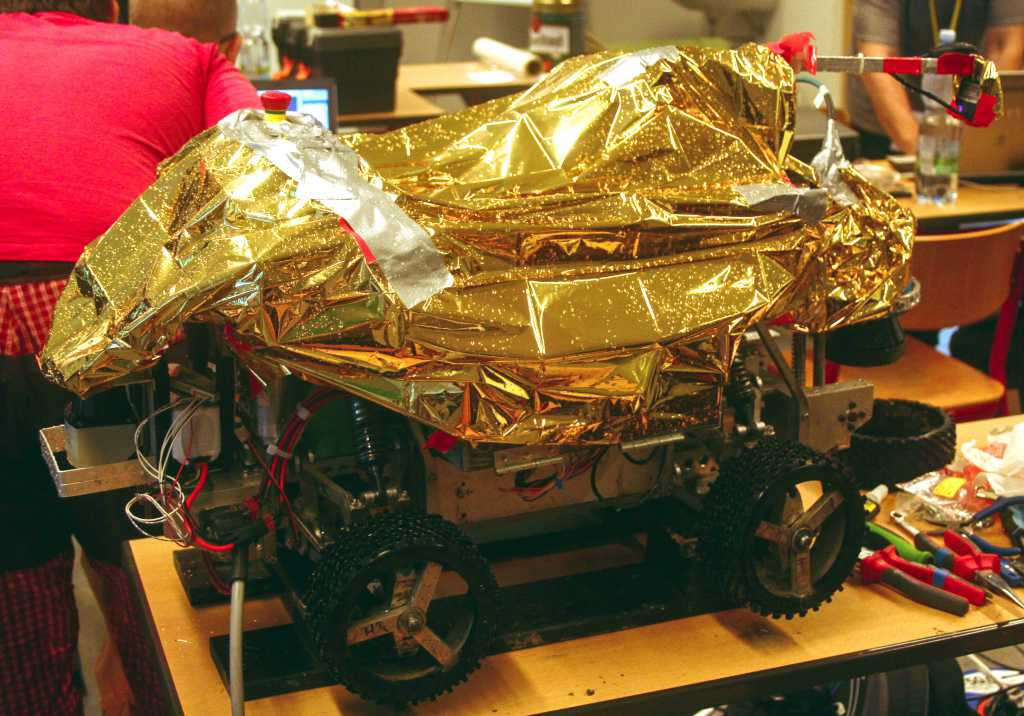
Über die Verbesserung jedes Punktes und Anforderungen künftiger Einsätze haben wir uns während der Konzeptionsphase umfangreiche Gedanken gemacht. Der Roboter Beteigeuze hat nach drei Jahren Konzeption, Entwicklung, Konstruktion und Erprobung seinen ersten Sieg bei der
Robotour 2015 eingefahren. Nichtsdestotrotz machen wir weiterhin konstruktive Anpassungen auch für andere Wettbewerbe. Im Sommer 2015 konnten wir uns nach zahlreichen Verbesserungen an Mechanik und Elektrotechnik zum ersten Mal voll auf die Software konzentrieren.
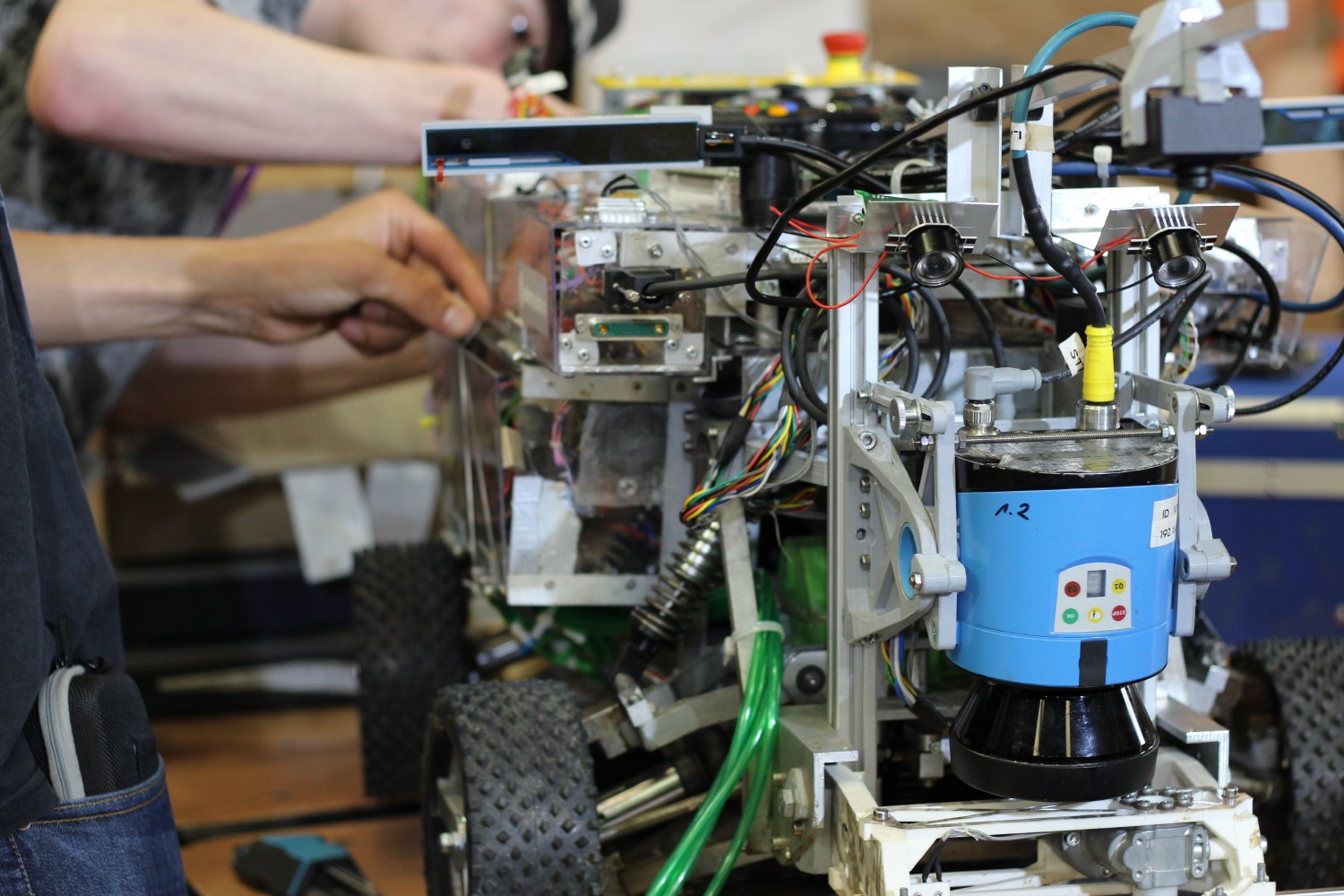
2019 und 2020 haben wir die Elektrotechnik basierend auf einer echtzeitfähigen Middleware —
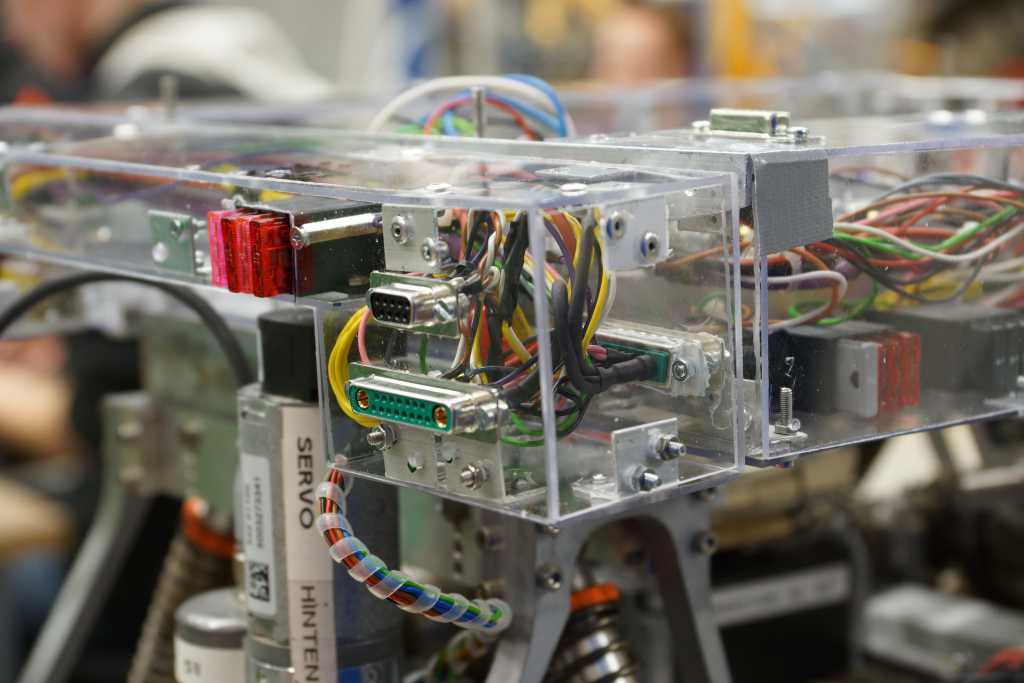
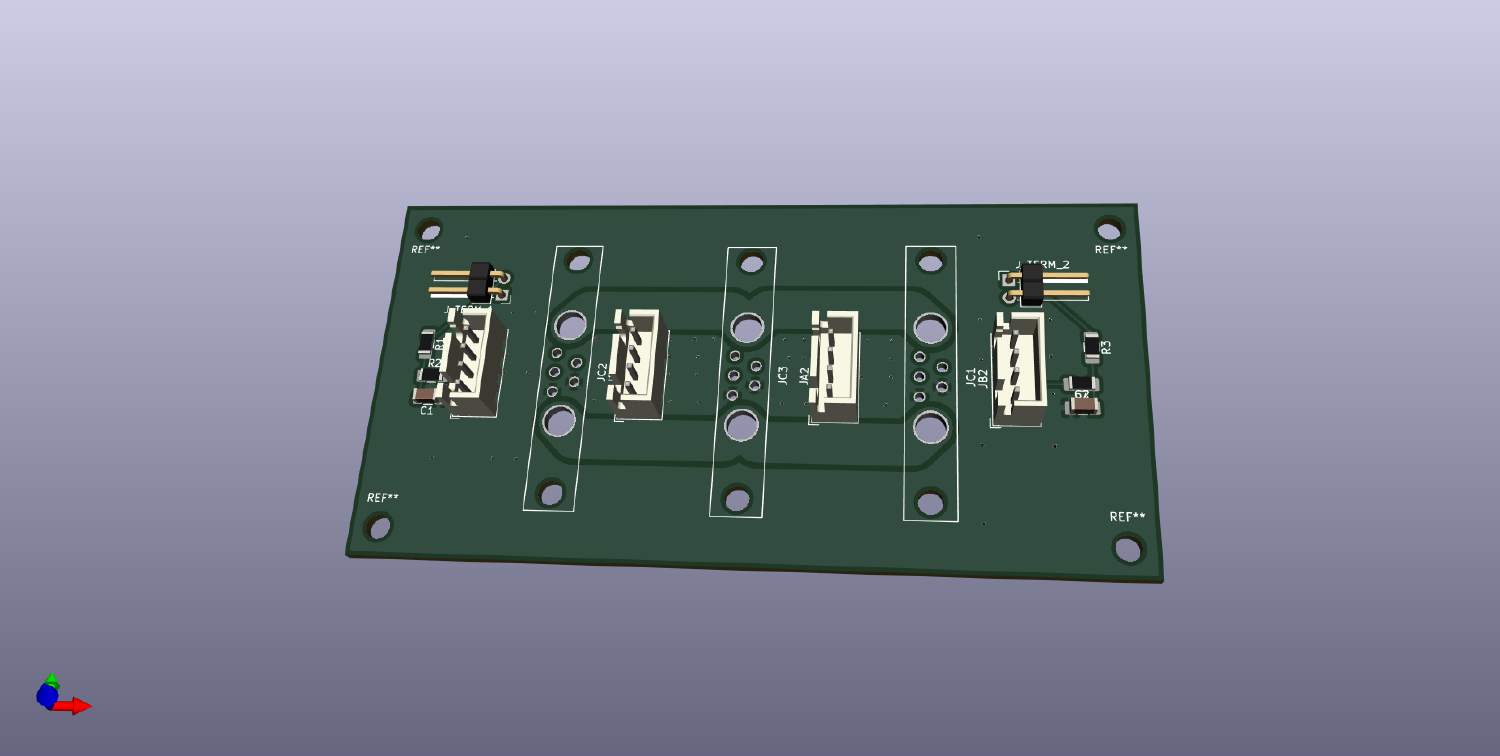
RODOS — neu aufgebaut. Ein neu entwickelter Kabelbaum stellt zwei Arrays von baugleichen Steckverbindern bereit, an denen wir Module anschließen. Weiterhin entkoppelt die Middleware unsere Software von der Hardware, auf der sie aufbaut. Damit können wir alte Platinen mit neuen ersetzen, Module neuprogrammieren, ohne bestehende ändern zu müssen und somit die Elektronik stetig verbessern.
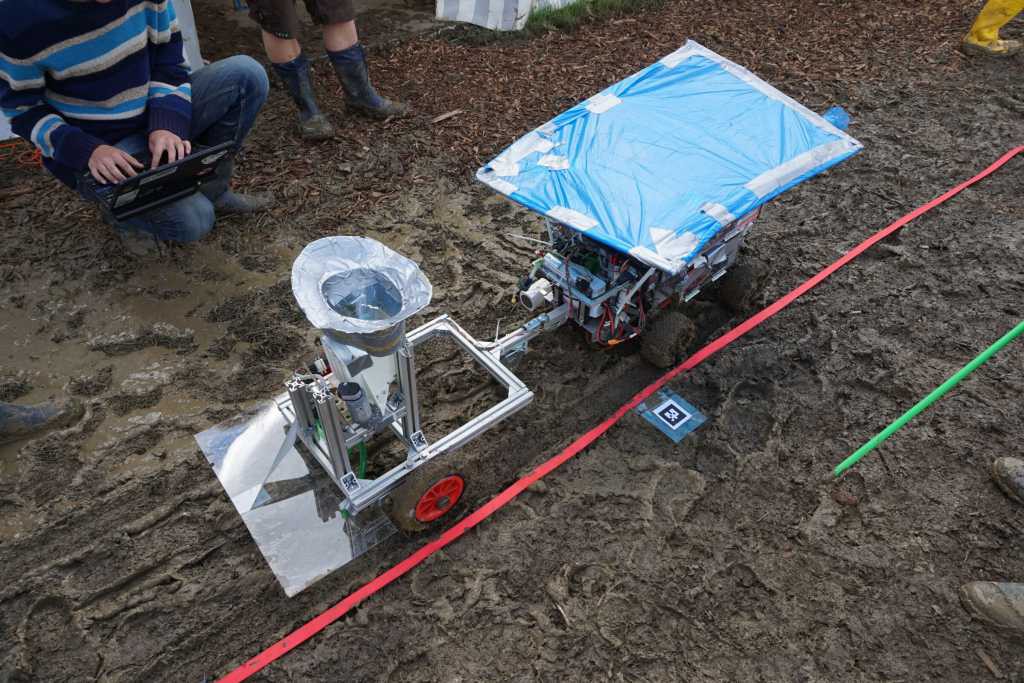
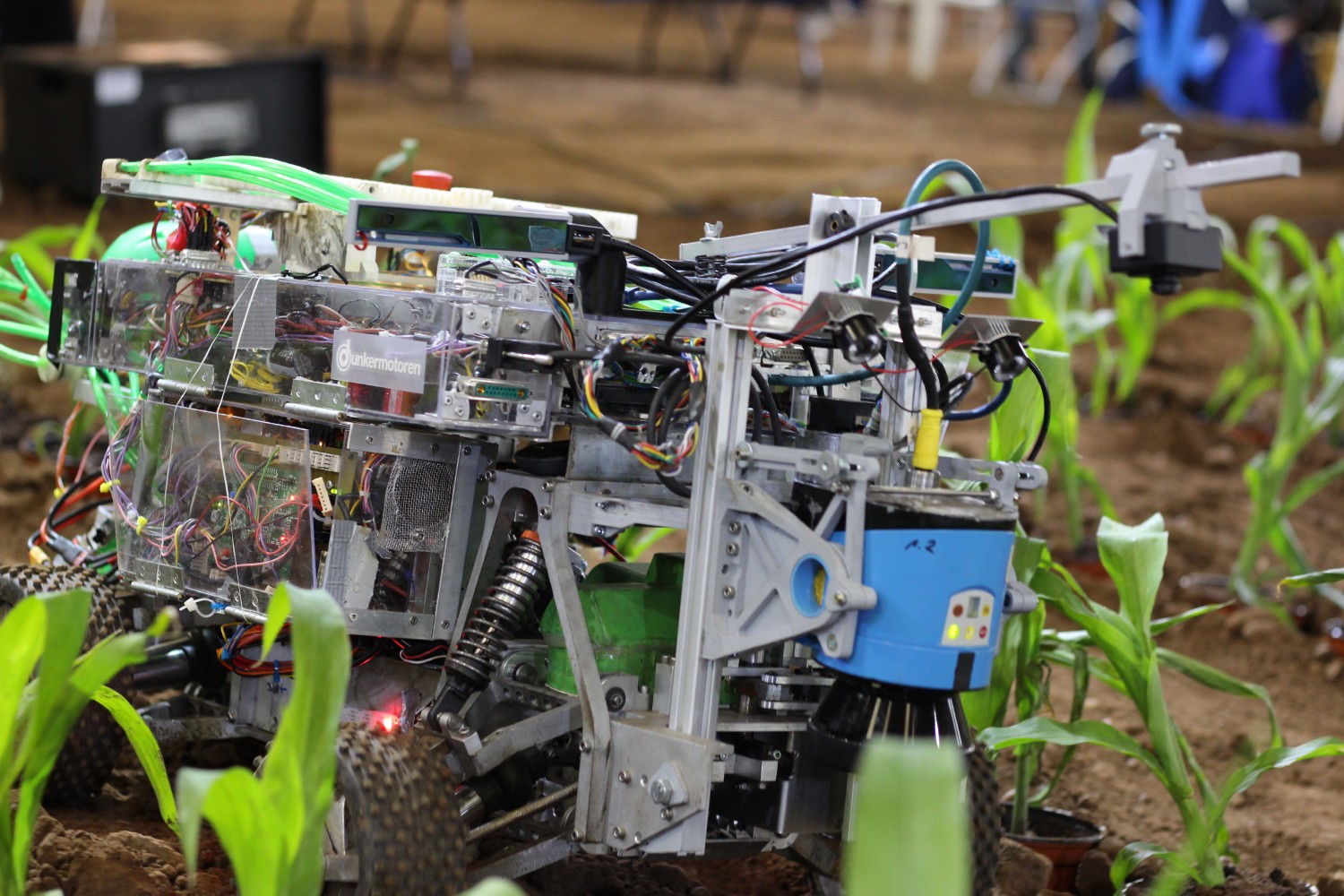
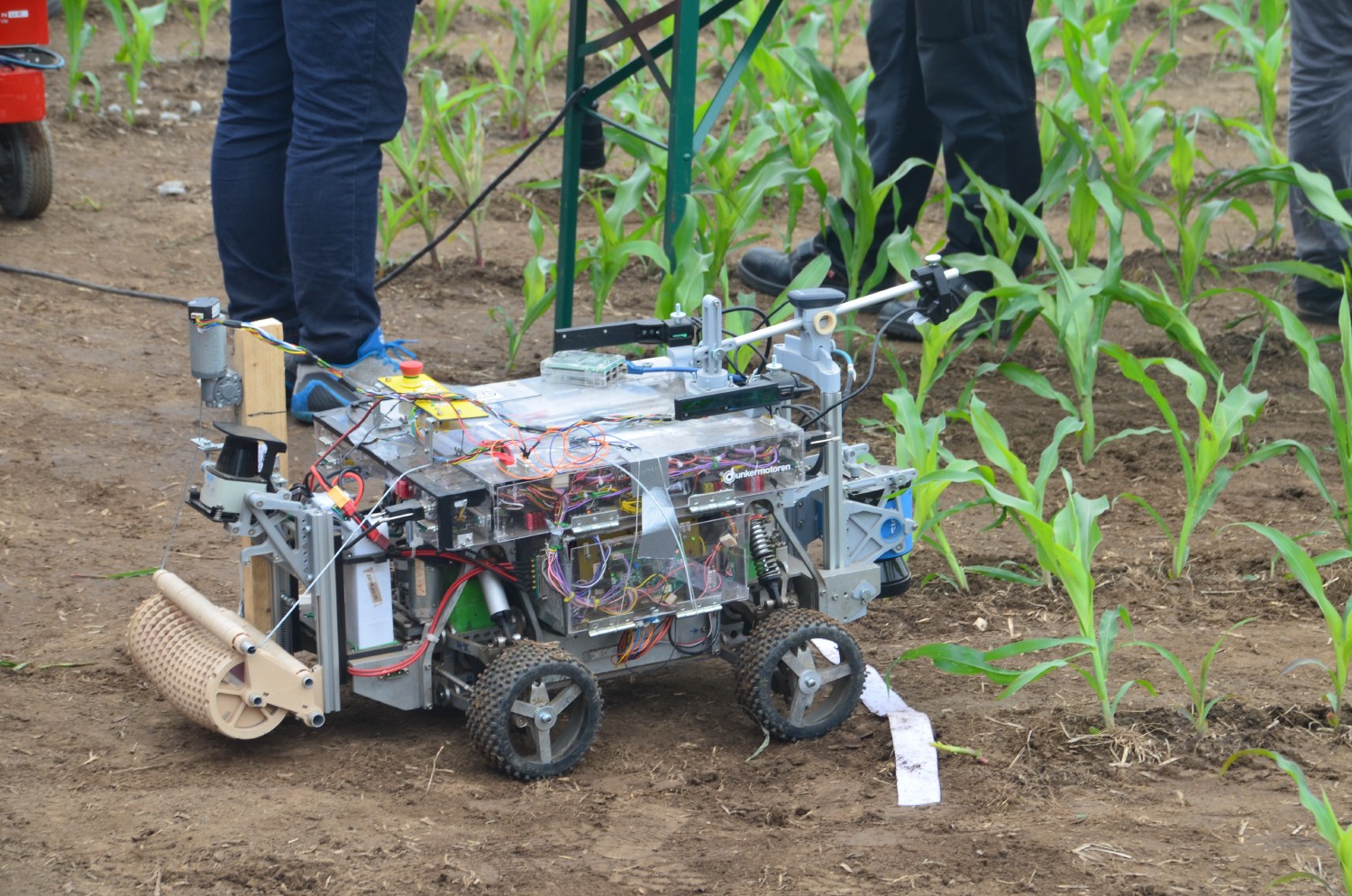
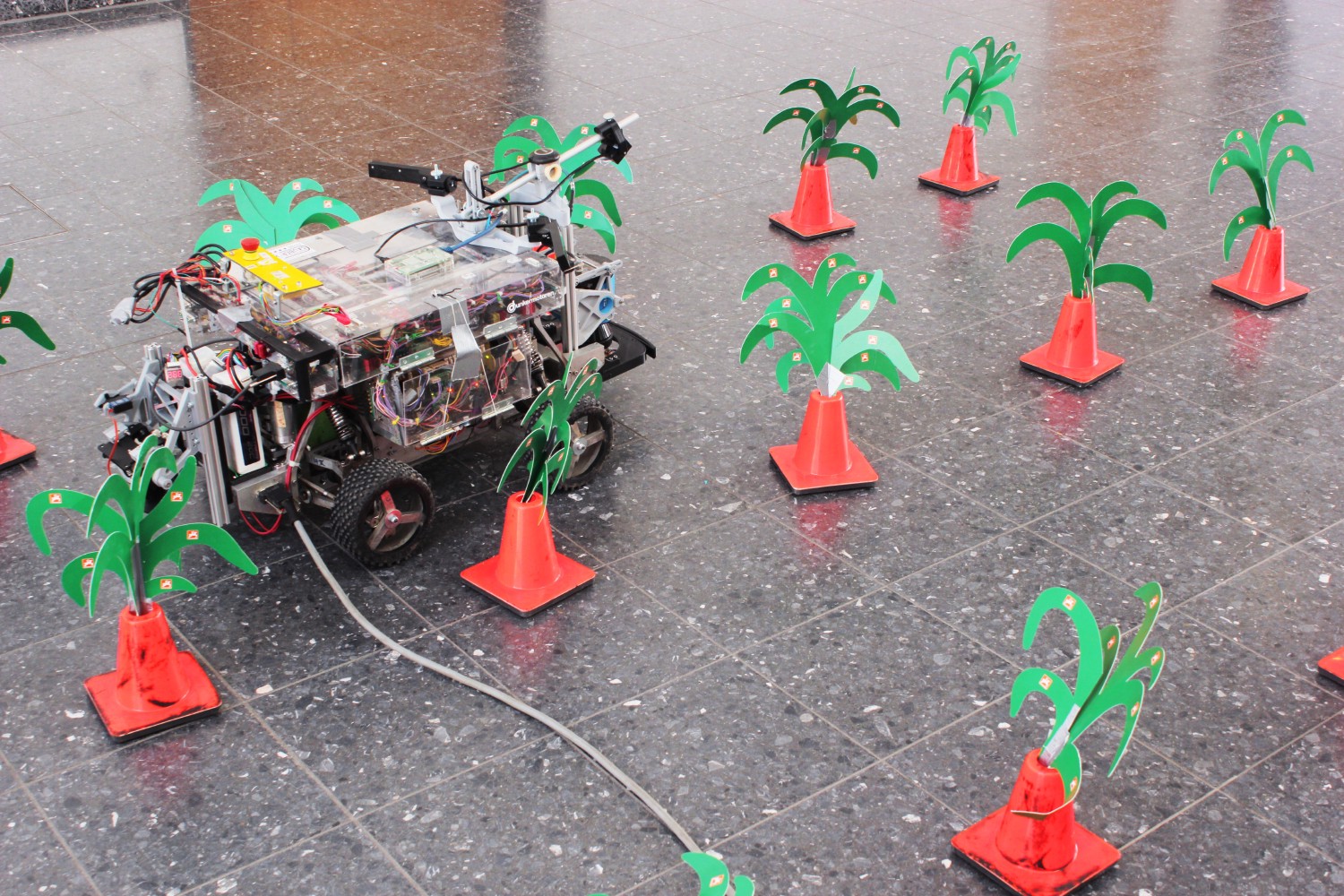
From June 13th to 16th we partook in the annual Field Robot Event, the international field robotics showdown. This year the contest was split in a real world field contest and a virtual field contest which again took place in our virtual maize field simulation environment.
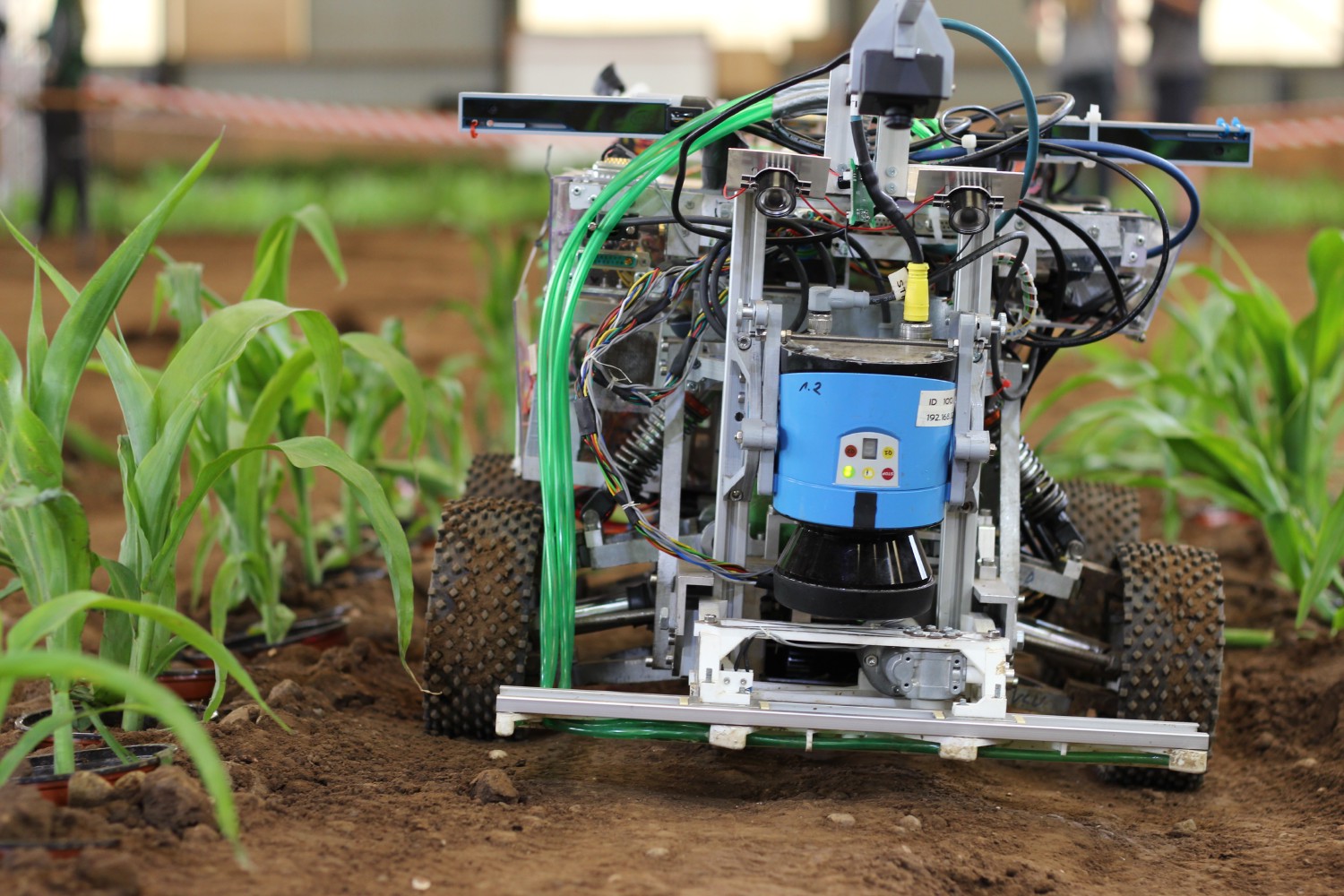
As our name Kamaro (Karlsruhe maize robots) suggests we make maize and robots. While we have been obsessing about the robot part, we have been lacking maize as of late. Also, we were excited about testing our brand-new driving algorithm! So, we set about growing our very own maize field behind building 70.21.
The most important part of planting a healthy maize field was preparing our soil to be fluffy and receptive for our maize seeds. We more or less succesfully employed a marsh rotary tiller.
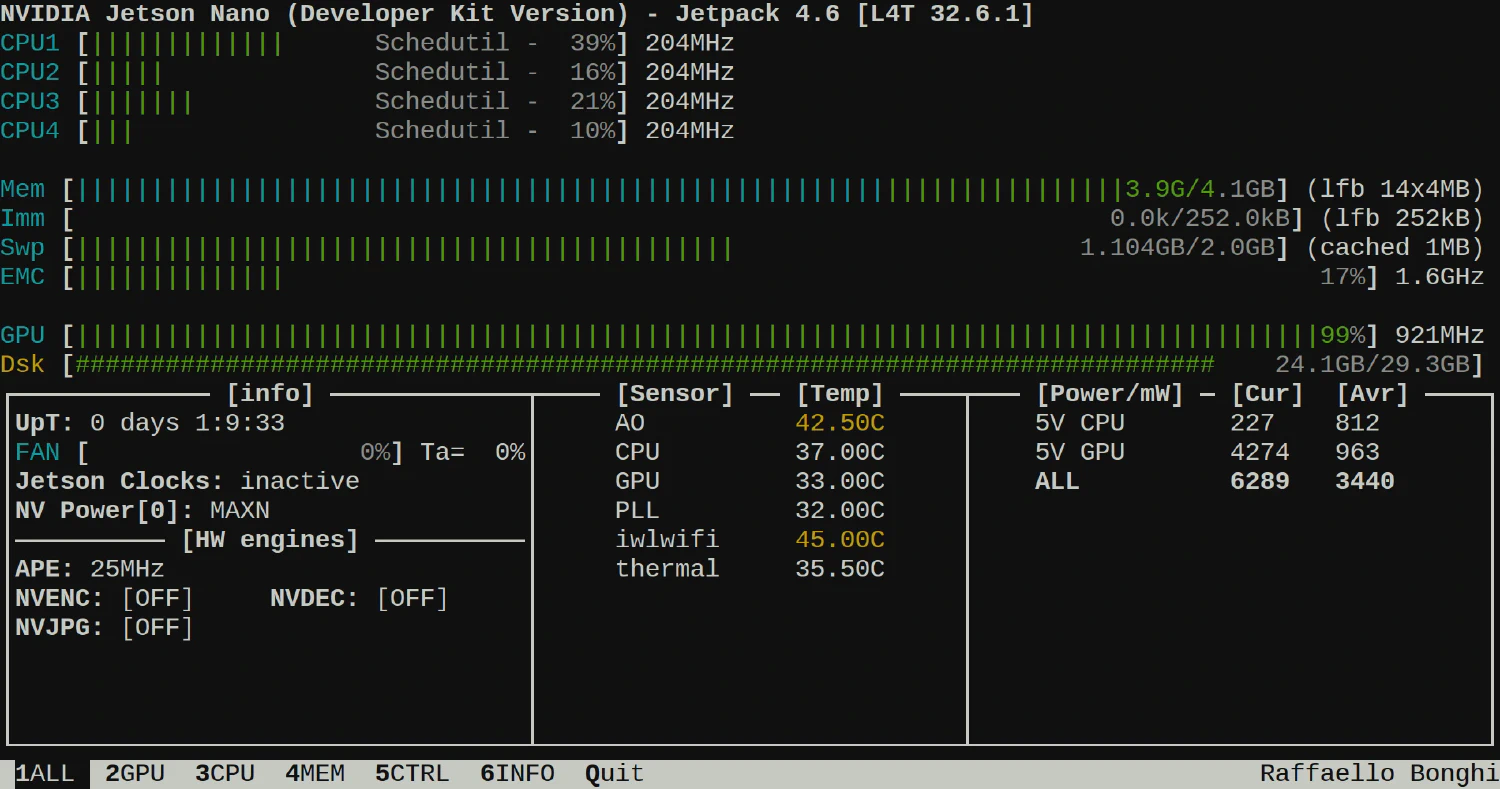
Up until now we used the Nvidia Jetson Nano for machine learning acceleration purposes. Sadly, running our object detection models wasn’t viable on the Jetson Nano despite using its CUDA-capable GPU. Our Jetson Nano only managed a poor 5 spf (seconds per frame) and had both its RAM and VRAM running out of space constantly. In order to remedy this, we looked for stronger hardware.
When we upgraded our robot Beteigeuze with entirely new electronic components, we decided on nVidia’s Jetson Nano platform as the robot’s primary computer. The Jetson Nano is an ARM based quad-core System-on-a-Chip (SOC) that features CUDA acceleration for Deep Learning models.
As a test, we tried deploying the model that we used during last year’s Virtual Field Robot Event on the new hardware platform. Even though that model was trained for simulation, we hope that models of the same or similar architecture will be of value for us in this year’s event. The model is a ResNet50 from PyTorch’s torchvision.
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021. A detailed description of the algorithm is available in the Readme file on Github and in the Proceedings of FRE 2021.
Beteigeuze, unser ältester Roboter, der sich in Betrieb befindet, hat einen vollständig überarbeiteten Kabelbaum erhalten. Das NOVA getaufte Projekt ersetzt die alte und monolithische Masterplatine mit austauschbaren Komponenten. Inzwischen bestehen die ersten Module ihre Tests und wir können es kaum erwarten, den Roboter wieder in Aktion zu sehen. Sind Sie auch gespannt? Am InnovationFestival@karlsruhe.digital] am 16.10.2020 können Sie online und live das Rollout Beteiguze NOVA miterleben.
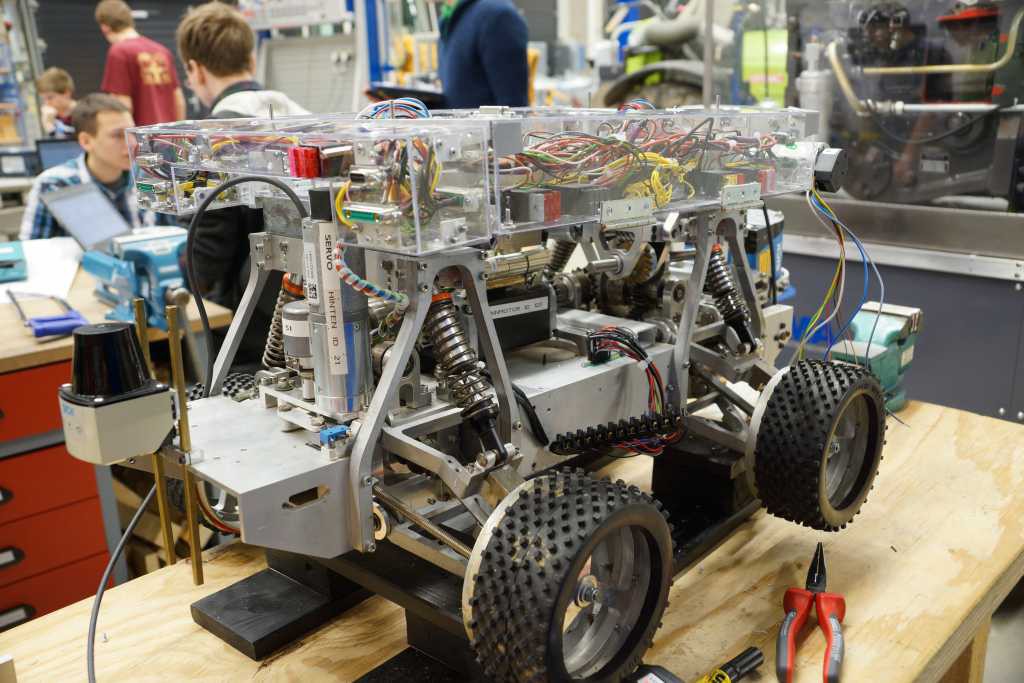
Dieser Artikel stellt das Projekt NOVA des Teams Elektrotechnik vor, mit dem angestrebt wird, modulare Roboter mit RODOS als Middleware zu konstruieren, deren Komponenten einfach in ROS integrierbar sind. Bisher setzte sich unser Gesamtsystem aus zwei Modulen zusammen: Einer mobilen Roboterplatform und einem aufgabenspezifischen Anbaugerät. Jedoch modularisiert NOVA einen Schritt weiter; die Roboterplattform selbst wird aus Modulen wie Batteriemanagementsystem, Inertialnavigationssystem, Kameras, Diagnose-Displays und Chassis aufgebaut werden.
Die Reise zum Field Robot Event 2018 startete schon einen Tag früher als gewöhnlich. Das Team FREDT hatte uns eingeladen, sie im nahegelegenen Braunschweig zu besuchen. Nach einer sechsstündigen Autofahrt wurden wir mit einem angeheizten Grill und kühlen Getränken empfangen. Eine Werkstattführung durfte natürlich auch nicht fehlen. Nach einem gemütlichen Abend konnten wir bei einigen Mitgliedern von FREDT zu Hause übernachten, vielen Dank dafür.
A typical task in modern farming is the measurement of the state of plants. The Normalised Difference Vegetation Index is an index commonly used to determine plant health. It is defined as following: (NIR-Red) / (NIR+Red) Healthy plants have a NDVI value near one, vegetation free areas have a value near or below 0. The RealSense R200 is the first affordable, outdoor usable 3d camera. It has two NIR sensors for disparity calculation and one RGB sensor.
Das Field Robot Event 2017 an der Harper-Adams-University geht mit dem bisher größten Erfolg in die jungen Geschichte der Hochschulgruppe Kamaro Engineering ein. In einem spannenden Wettkampf konnte das Team von Kamaro den Gesamtsieg erringen und im Freestyle Task, bei dem die Teilnehmer außerhalb der Wertung ihr Können zeigen, ebenfalls den ersten Platz belegen.