Kamaro auf der KIT-Jahresfeier
Einmal im Jahr feiert das KIT mit Mitarbeitern, Gästen aus Wirtschaft, Forschung und Politik und einigen studentischen Beiträgen seinen Geburtstag.
Kamaro ist es gelungen, mit einem interaktiven Lounge-Konzept die Veranstalter rund um Frau Baumgartner von der Abteilung Presse, Kommunikation und Marketing des KIT zu überzeugen und so eine der begehrten Ausstellungsflächen zu ergattern. Am Stand waren die Roboter Kamaro 2010 und Beteigeuze sowie ein Ausblick auf das kommende Projekt Kamaro-Next zu sehen. Mit Videos der vergangenen Wettbewerbe und Exponaten aus der aktuellen Entwicklungsarbeit konnten sich die Besucher einen Einblick in die Welt der Robotik verschaffen.
EKF-SLAM erklärt: Wie sieht ein Roboter die Welt?
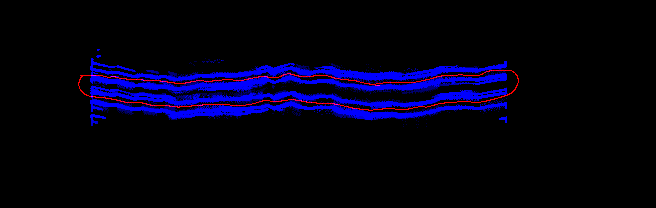
Um eine detaillierte Karte der Umgebung zu erstellen, setzten wir auf einen EKF-SLAM Algorithmus (Extendes Kalman Filter — Simultaneous Localization And Mapping). Die Kartenerstellung mit EKF-SLAM ist eine Möglichkeit für Roboter, die Welt zu sehen. Um zu verstehen was das ist, sollte man jedoch zunächst einige Grundlagen betrachten.
Unser Roboter tastet mit zwei LiDAR-Scannern seine Umgebung 360 ° ab. Mit Hilfe dieser Sensoren können Objekte erkannt und Richtungsentscheidungen getroffen werden. Allerdings kann der Roboter so nicht gezielt navigieren, sondern höchstens Objekten ausweichen. Mit unserem Mapping Algorithmus speichern wir die Daten der Scanner und fügen sie Schritt für Schritt zu einer Karte zusammen. In dieser kann der Roboter sich dann lokalisieren und gezielt zu bestimmten Positionen fahren. Das Erstellen einer Karte einer unbekannten Umgebung unter gleichzeitiger Lokalisierung des Roboters ist eines der großen Probleme in der Robotik. Die Lösungsansätze werden in einer eigenen Klasse - SLAM - zusammengefasst.
Frohes Neues!
Das Jahr 2015 endet, und wir blicken zurück auf eines der lebhaftesten und erfolgreichsten Jahre unserer jungen Vereinsgeschichte.
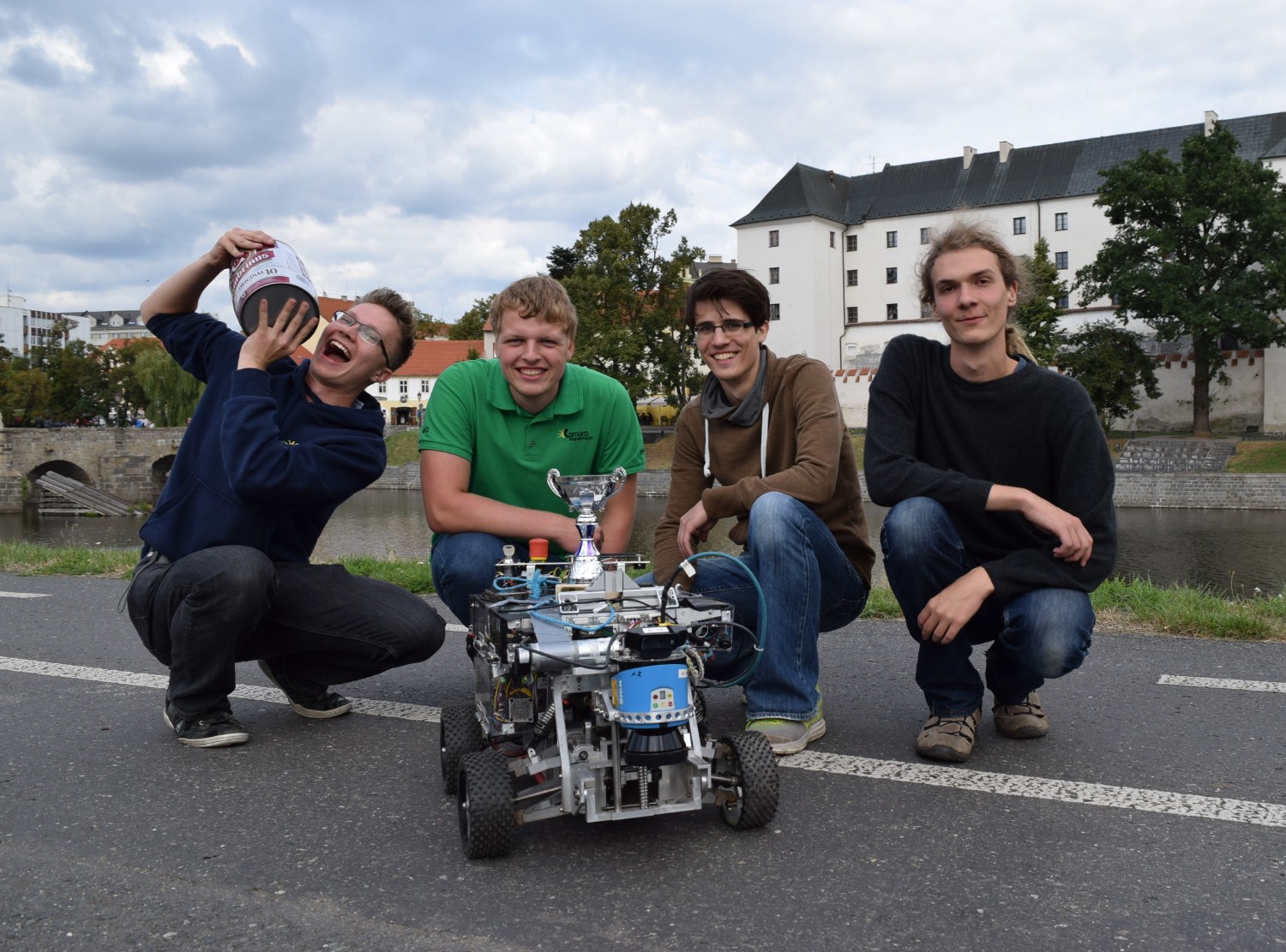
Neuer Vorstand, neue Satzung, neue Webseite und viele neue Mitglieder. Mit unserem starken Team und der Hilfe zahlloser großer und kleiner Unterstützungen konnten wir beim Field Robot Event 2015 in Slovenien eine sehr gute Platzierung erreichen und die Robotour 2015 in Tschechien sogar bei unserer ersten Teilnahme gewinnen!
Im Herbst sind viele neue, motivierte Studenten zu uns gestoßen, die mit großem Eifer das neueste Roboterprojekt „Kamaro neXt“ Wirklichkeit werden lassen.
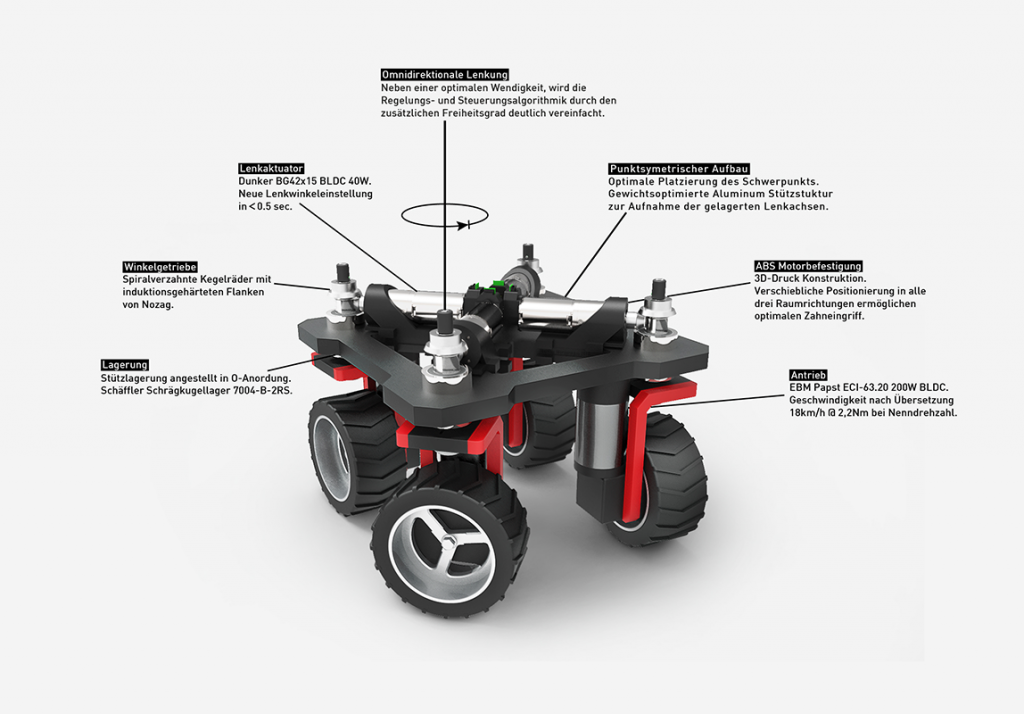
Kamaro neXt
Wir starten mit vielen neuen Mitgliedern und neuen Ideen in die Saison. Ergänzend zu unserem Roboter Beteigeuze entwickeln wir nun ein hoch manöverierfähiges Modell für neue Einsatzszenarien.

FRE 2015 – Ein Resümee
Kamaro fährt beim Field Robot Event den bisher größten Erfolg in der Geschichte des Vereins ein und bereichert den Wettbewerb gleich um eine neue Disziplin.

Endspurt FRE 2015
Das Field Robot Event 2015 rückt mit jeder Stunde näher. Das Team arbeitet jetzt auf Hochtouren. Tag und Nacht.
Die letzte Woche vor dem Field Robot Event beginnt mit Sonnenschein und über 30 °C. An allen Teilen des Roboters wird jetzt gearbeitet. Verbesserungen am Quellcode, den Algorithmen, der Elektronik und der Mechanik werden umgesetzt um den Roboter optimal auf den Wettbewerb abzustimmen. Unser Testfeld wächst bei dem guten Wetter fast schneller, als uns lieb wäre. Werden die Pflanzen zu groß, entsprechen sie nicht mehr den Wettbewerbsbedingungen.
Testlauf FRE 2015
Das Testprogramm läuft auf vollen Touren. Wir vergleichen verschiedene Varianten von Algorithmen hinsichtlich Geschwindigkeit, Robustheit und Genauigkeit.
Wie sieht ein Roboter die Welt
Was dem Menschen spielerisch einfach gelingt, gehört zu den schwierigsten Aufgaben der Informatik.
Fliegende Bälle zwischen chaotisch umherlaufenden Spielern auf dem Sportplatz, rangieren mit Anhänger auf engen Baustellen oder Zwiebeln schneiden ohne Blutvergießen. Für den Menschen mit seiner genialen Sensorik kein Problem.
Bis Heute gibt es Forschern manches Rätsel auf, wie genau das eigentlich funktioniert. Doch auch die Technik entwickelt sich schnell, automatische Einparkhilfen oder Spurhalteassistenten sind schon längst im Massenmarkt angekommen.
Neuer Kabelbaum
Kabel kann man auf viele Arten verlegen. In der Vergangenheit hat die Verkabelung häufiger zu Problemen geführt. So waren wir bei unserem Roboter Kamaro 2010 nicht nur immer wieder Kabelbrüchen auf der Spur, sondern mussten auch mit verpolt angeschlossenen Akkus kämpfen. Der neue Roboter Beteigeuze hatte dafür zunächst eine stabile, aber unübersichtlichen Verkabelung, die zudem in kürzester Zeit vor dem Wettbewerb FRE 2014 entstanden ist. Damit ist nun endlich seit März 2015 Schluss: Beteigeuze hat einen neuen, modularen, übersichtlichen Kabelbaum erhalten.