
Lies unseren Blogbeitrag auf karlsruhe.digital
Der Beitrag ist von karlsruhe.digital und wurde zuerst auf karlsruhe.digital veröffentlicht.
Kamaro Engineering ist ein gemeinnütziger Verein und eine Hochschulgruppe am Karlsruher Institut für Technologie (KIT), die autonome Roboter entwickeln – mit einer besonderen Leidenschaft für Agrarroroboter. Am 1. Juli waren sie bei der Bunten Nacht der Digitalisierung 2022 mit von der Partie. Wir wollten es nun genauer wissen: Was haben Technologie, Digitalisierung und Landwirtschaft gemeinsam? Und warum profitieren wir alle davon, wenn Roboter durchs Maisfeld düsen? Leon Tuschla, zweiter Vorstand des Vereins und Lea Schulze, Mitglied im Team Informatik von Kamaro, trafen uns für einen tieferen Einblick.

Field Robot Event 2022 Proceedings
From June 13th to 16th we partook in the annual Field Robot Event, the international field robotics showdown. This year the contest was split in a real world field contest and a virtual field contest which again took place in our virtual maize field simulation environment.

Getting ready for FRE2022: (non-virtual) testing maize field
As our name Kamaro (Karlsruhe maize robots) suggests we make maize and robots. While we have been obsessing about the robot part, we have been lacking maize as of late. Also, we were excited about testing our brand-new driving algorithm! So, we set about growing our very own maize field behind building 70.21.
The most important part of planting a healthy maize field was preparing our soil to be fluffy and receptive for our maize seeds. We more or less succesfully employed a marsh rotary tiller.

Nvidia Jetson Xavier NX integration on Beteigeuze
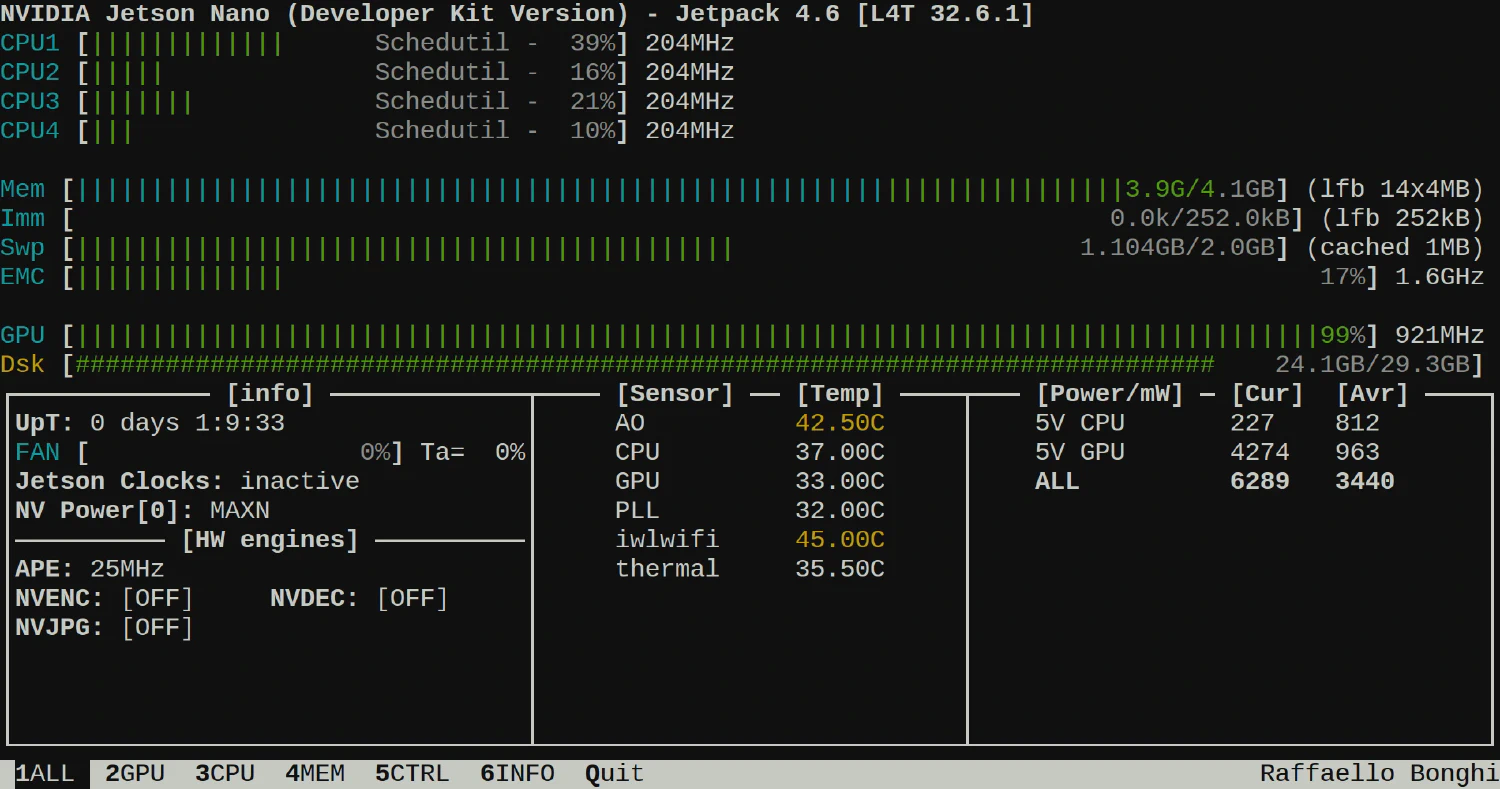
Up until now we used the Nvidia Jetson Nano for machine learning acceleration purposes. Sadly, running our object detection models wasn’t viable on the Jetson Nano despite using its CUDA-capable GPU. Our Jetson Nano only managed a poor 5 spf (seconds per frame) and had both its RAM and VRAM running out of space constantly. In order to remedy this, we looked for stronger hardware.
Deploying ResNet50 semantic segmentation model on the nVidia Jetson Nano using onnxruntime
When we upgraded our robot Beteigeuze with entirely new electronic components, we decided on nVidia’s Jetson Nano platform as the robot’s primary computer. The Jetson Nano is an ARM based quad-core System-on-a-Chip (SOC) that features CUDA acceleration for Deep Learning models.
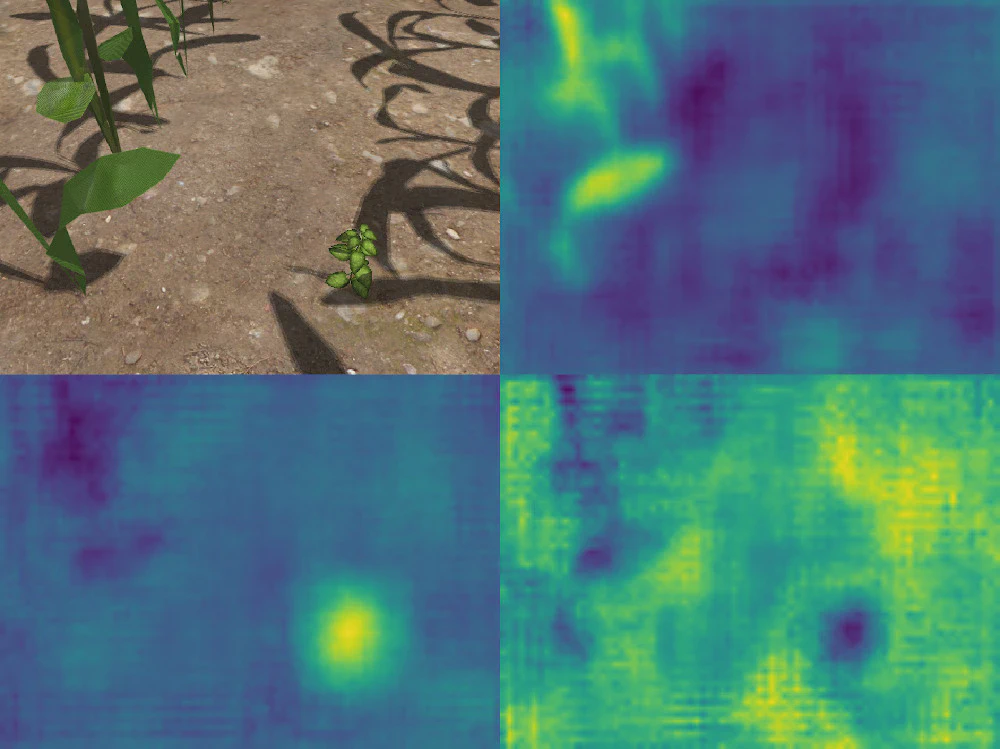
As a test, we tried deploying the model that we used during last year’s Virtual Field Robot Event on the new hardware platform. Even though that model was trained for simulation, we hope that models of the same or similar architecture will be of value for us in this year’s event. The model is a ResNet50 from PyTorch’s torchvision.
Update Infoabend jetzt Hybrid 02.12.2021
Aufgrund der aktuellen Coronalage planen wir unseren Infoabend als Hybridveranstaltung. Dieser findet nach wie vor am Donnerstag den 02.12.2021 um 19.30 Uhr statt.

Between War and Sea − Kunstausstellung mit Anas Kahal
Wir haben die letzten Monate zusammen mit Anas Kahal unseren Roboter Cassiopeia so umgebaut, dass dieser zum Teil der Ausstellung „Between War and Sea“ wird. Dazu wurde Cassiopeia zu einem Beam-Roboter umgebaut, der sich − mit einem Projektor ausgerüstet − vollständig autonom durch den Raum bewegt und dabei das Kunstwerk „Flags“ an die Wände projiziert.
Infoabend am 02.12.2021
Wichtige Updates zum Infoabend unter: Update Infoabend jetzt Hybrid 02.12.2021. Unser diesjähriger Infoabend findet am Donnerstag den 02.12. um 19.30 Uhr im Gebäude 70.04 am Campus Ost statt.
Wenn ihr euch für uns interessiert und Lust habt bei uns mit zu machen dann kommt gerne vorbei!

Publishing our Maize Row Navigation Algorithm
Following the release of our object detection deep learning code, model and dataset, we are now publishing the code we used for navigating within a crop row at the Field Robot Event. This code has now been in use at Kamaro for several years, and most recently won Task 1 at the competition in 2021. A detailed description of the algorithm is available in the Readme file on Github and in the Proceedings of FRE 2021.
Publishing our Object Detection Network and Dataset
FRE 2021 is over! It’s been a great week seeing all of the other teams again and competing with one another. We are grateful for the opportunity we had in building the competition environment and shaping this year’s Field Robot Event!
We were especially pleased with the organizers’ decision to include realistic 3D plant models for the weed detection task. For a long time, simple color-based detectors were sufficient to solve the detection tasks at the Field Robot Event. However, such approaches are not adequate to perform a plant recognition task in a realistic scenario. On the real field, robots will have to distinguish between multiple species of plants — all of which are green — in order to perform weeding, phenotyping and other tasks. Deep learning has been around for a few years now and seems to be the most applicable tool to tackle this challenge.