Stand der (Elektro-) Technik
Planungsphase - ✓ Abgeschlossen
In der Planungsphase haben wir uns überlegt, welche Funktionalität der Roboter bereitstellen soll und wie wir diese am besten gliedern. Dabei sind wir zu folgendem Ergebnis gekommen:
Konzeption Kommunikation und Aufbau
Sensoren
Um die gewünschten Anforderungen zu erfüllen, haben wir uns für folgende Sensoren entschieden:
- Umgebung (Lidar, Ultraschall, Infrarot)
- Endanschläge für Lenkung und Greifarm (Positionierung und Objektinteraktion)
- Positionierung (Beschleunigung, Gyroskop, Magnetometer, evtl. GPS)
Platinen
Es stellte sich eine Gliederung in folgende drei funktionale Einheiten als sinnvoll heraus:
- Stromversorgungsplatine: Akkubetrieb, Netzbetrieb; Leistungsüberwachung
- Masterplatine + Master-Shield-Platine: Zentrale Schnittstelle zwischen Platinen und Computer; Sensordaten hinten auslesen und vorverarbeiten
- Sensorplatine (vorne): Sensordaten vorne und vom Roboterarm auslesen und vorverarbeiten
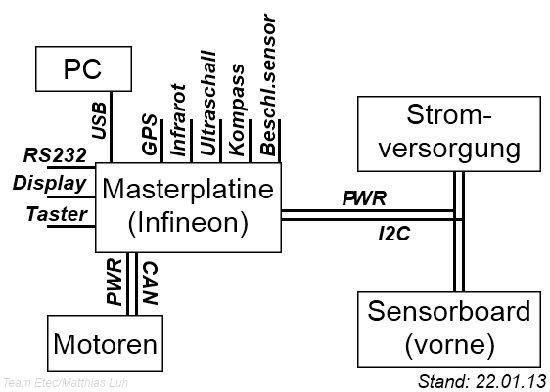
Kommunikation
Zur Realisierung des Daten-Flusses haben wir uns folgendes Konzept überlegt:
- Kommunikation zwischen den Platinen: I²C
- Kommunikation zwischen Platinen und PC: UART über USB
- Kommunikation zwischen Platinen und Motoren: CAN
Designphase- ✓ Abgeschlossen
In der Designphase ging es darum die Ideen und Konzeption der Planungsphase konkret in Schaltpläne, Platinenlayouts und konkrete Bauteile umzusetzen.
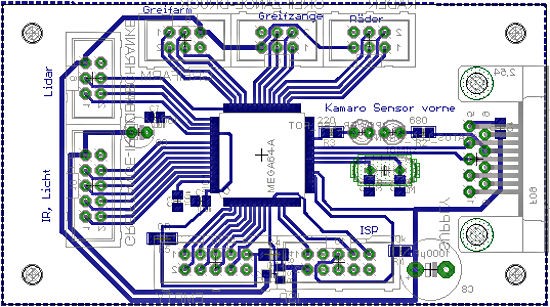
Platinenlayout mit EAGLE von der Sensorplatine vorne
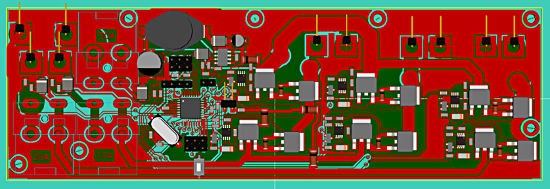
3D Layout mit KiCAD von der Stromversorgungsplatine
Bei der Umsetzung der Schaltpläne wurde auch die Funktionalität der einzelnen Platinen genau spezifiziert und implementiert. Als Master Platine haben wir uns für das XMC4500 Relax Kit von Infinion mit einem ARM Prozessor entschieden. Diese wickelt die Kommunikation zwischen Computer und Hardware ab. Da wir direkt das fertige Relax Kit verwenden, benötigen wir zur Anpassung an verschiedene Spannungspegel und zur direkten Auswertung von Sensoren eine Shield-Platine, welche über Stiftleisten mit dem XMC4500 direkt verbunden wird. Von dieser aus ist die vordere Sensorplatine sowie die Stromversorgungsplatine über I²C angebunden. Zum Anderen ist sie per USB mit unserem PC verbunden.
Fertigung
Die Platinen wurden mittlerweile gefräst. Aktuell warten wir auf die bestellten Bauteile um die Platinen fertig zu stellen.
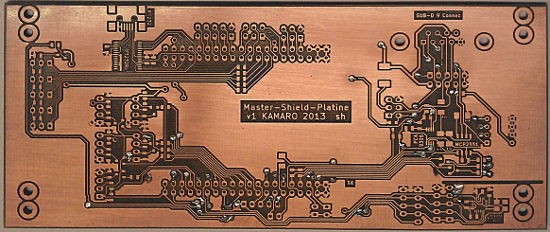
Gefräste Master Shield Platine (Hergestellt am ITIV)