
Reinforcement Learning and Model Predictive Control
Although Luna relies on a broad range of sensors delivering real time feedback for direct control, we are planning to enhance the capabilities and real world Application. There are two distinct ways to improve those Aspect through Machine Learning (ML), on one side we use auxiliary ML models to increase the reliability of our system as a whole through using additional sensors to improve main sensors readings. The other application covers a broader range of application through learning Agent Policies that can control luna on their own and follow given commands such as moving in a certain direction or rotating on the spot. Through the implementation of digital twin we were able to test our software stack and hardware plans before starting the costly process of creating hardware prototypes, therefore increasing the amount of time we needed to get our first working system into a prototype state.
Ankündigung: Infoabend und Events
Unser diesjähriger Infoabend findet am Donnerstag den 09.11.2023 um 18:00 Uhr in Raum 016, im ETI Gebäude 11.10, statt. Auch dieses Semester werden wir uns wieder auf einigen Events vorstellen. Geplant ist die Erstsemesterbegrüßung des KIT am 27.10.2023, die TechHSG Messe am 07.11.2023. Außerdem veranstalten wir zusammen mit dem KFG einen University Club am 07.11.2023 zudem wir mit freude einladen.
Anas Kahal + Kamaro Engineering e. V. win first place at Kunstpreis TechnologieRegion Karlsruhe
After an eventful week at the international FRE in Slovenia, we got to attend another award ceremony with artist Anas Kahal. A the first Kunstpreis TechnologieRegion Karlsruhe, the jury awarded first place to his ingenious exhibit which features one of our self-built autonomous robots. With Cassiopeia, Kahal creates a dynamic environment in which viewers are guided through found footage of the Syrian civil war by the movements of an autonomous robot.

Kamaro wins sensing Task at FRE 2023
At this year’s Field Robot Event at the University of Maribor in Slovenia, our robot impressively outperformed 14 other competitors in the computer vision-focused Task 3. The task determined the accuracy of the competing robots‘ recognition systems on a series of images of people, deer, and other objects. We also took 2nd place in the Freestyle category and 4th place in the Smart Irrigation task.
We would like to thank our sponsors who supported our participation in the competition with financial resources and hardware. For a deep dive into our methodology, we will soon publish our FRE 2023 proceedings on this blog.

Events im SS23: TechHSG, Campustag und Infoabend
Kamaro startet im neuen Semester voll durch und suchen dabei deine Unterstützung! Wir haben viele interessante Projekte, an denen aktuell gearbeitet wird. Dabei ist zu Beispiel:
Entwicklung und Bau eines Roboterarms zum autonomen Erdbeerpflücken Vorbereitung auf das Field Robot Event 2023 bei Maribor, Slowenien Entwicklung des neuen Roboters „Elektra“ Falls wir dein Interesse geweckt haben, dann schreib uns eine Email oder komm uns an einem der folgenden Events besuchen.

Publishing the "Carbonaro" dataset from FRE 2022
Last year, we published our dataset and models for image recognition during the online Field Robot Event 2021. Our blog post ended with a call for cooperation in creating a dataset and AI models for this year’s event, which has since taken place at DLG Feldtage in June. Team Carbonite from the Überlingen Students’ Research Center (SFZ Überlingen) approached and we subsequently worked together on building a realistic image dataset. As a nod to the two teamnames, this dataset shall henceforth be known by the name “Carbonaro”.

Workshop Samstag KITcar 💞 Kamaro
Letzten Samstag starteten wir unseren Workshop Samstag zusammen mit KITcar. Fünf Stunden lang ging es über diverse Themen von Mikrocontroller Programmierung über Gitlab Continuous Integration bis hin zu spannenden Machine Vision Entwicklungen. Ausreichend Pizza gab es natürlich auch.

Jahresbericht 2022
This is an inline a∗=x−b∗a^*=x-b^*a∗=x−b∗ equation.
These are block equations:
a∗=x−b∗a^*=x-b^*a∗=x−b∗a∗=x−b∗a^*=x-b^*a∗=x−b∗Das Jahr 2022 begann für Kamaro mit dem Ende der Ausstellung „Between War and Sea“ von Anas Kahal, für die wir unseren Roboter Cassiopeia zu einem autonomen „Beam-Roboter“ umgebaut hatten. Vom 26.11.21 bis zum 16.01.22 ist der Roboter dabei fast jeden Tag autonom durch die Ausstellung Regionale 22 im E-Werk Freiburg gefahren.
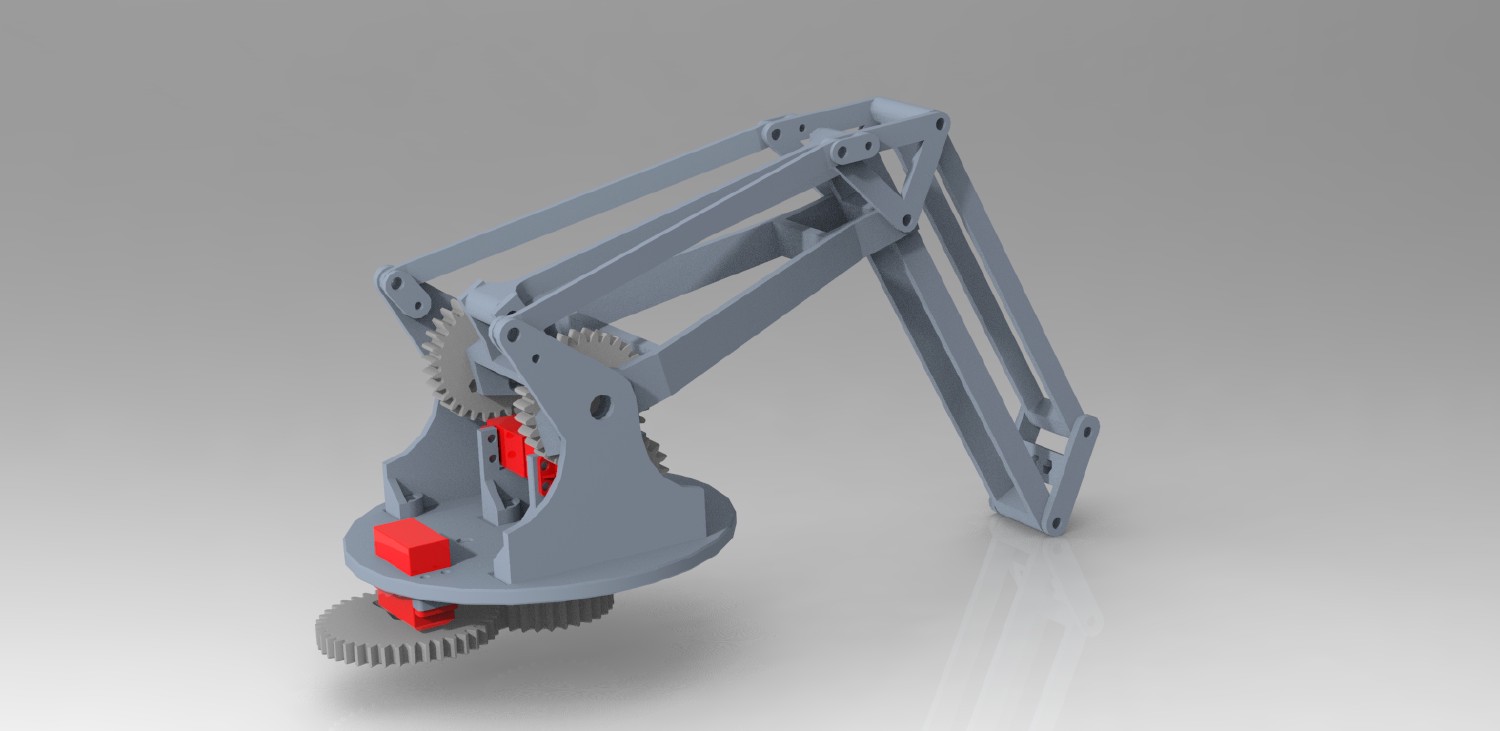
Bau eines neuen Roboterarms
Ein Projekt, was uns schon lange beschäftigt ist die Konstruktion eines Roboterarms. Bereits einige Versuche sind aus verschiedenen Gründen gescheitert. Überreste davon lagern noch in unseren Schränken — siehe Bilder. Leider war die Version zu schwer für normale Servos und ab einem bestimmten Winkel überschreitet man einen Kipppunkt von dem aus es nicht möglich ist wieder in die Ausgangslage zurück zu kehren. Damit war der Plan vom Roboterarm war vorerst vom Tisch. Doch die Idee ließ uns keine Ruhe.

Ankündigung: Infoabend und TechHSG
Unser diesjähriger Infoabend findet am Donnerstag den 24.11. um 18.30 Uhr in Raum 220, Gebäude 70.04 am Campus Ost statt. Falls ihr um 18:30 Uhr noch keine Zeit habt, könnt ihr natürlich auch später dazu stoßen.