
Up until now we used the Nvidia Jetson Nano for machine learning acceleration purposes. Sadly, running our object detection models wasn’t viable on the Jetson Nano despite using its CUDA-capable GPU. Our Jetson Nano only managed a poor 5 spf (seconds per frame) and had both its RAM and VRAM running out of space constantly. …
When we upgraded our robot Beteigeuze with entirely new electronic components, we decided on nVidia’s Jetson Nano platform as the robot’s primary computer. The Jetson Nano is an ARM based quad-core System-on-a-Chip (SOC) that features CUDA acceleration for Deep Learning models. As a test, we tried deploying the model that we used during last year’s …
Aufgrund der aktuellen Coronalage planen wir unseren Infoabend als Hybridveranstaltung. Dieser findet nach wie vor am Donnerstag den 02.12.2021 um 19.30 Uhr statt. Online-Teilnahme Falls ihr euch unwohl fühlt, erkrankt seid, keinen Test bekommt oder aus sonstigen Gründen nicht vor Ort teilnehmen könnt oder wollt, haben wir auch die Option, sich Online dazu zu schalten. …

Wir haben die letzten Monate zusammen mit Anas Kahal unseren Roboter Cassiopeia so umgebaut, dass dieser zum Teil der Ausstellung „Between War and Sea“ wird. Dazu wurde Cassiopeia zu einem Beam-Roboter umgebaut, der sich − mit einem Projektor ausgerüstet − vollständig autonom durch den Raum bewegt und dabei das Kunstwerk „Flags“ an die Wände projiziert. …

Wichtige Updates zum Infoabend unter: Update Infoabend jetzt Hybrid 02.12.2021 Unser diesjähriger Infoabend findet am Donnerstag den 02.12. um 19.30 Uhr im Gebäude 70.04 am Campus Ost statt. Wenn ihr euch für uns interessiert und Lust habt bei uns mit zu machen dann kommt gerne vorbei!
Abstract Kamaro Engineering e. V. forscht seit mehr als zehn Jahren an Feldrobotern und nimmt mit den entwickelten Prototypen an verschiedenen Wettbewerben teil. Beispielweise meistern die Roboter jährlich auf dem Field-Robot-Event neue Herausforderungen, die unterschiedlichste mechatronische Lösungen erfordern. Durch die von Event zu Event variierende Aufgabenstellung gewinnt eine modulare Bauweise mehr und mehr an Bedeutung, …
Aufgabe Die diesjährige Aufgabe des Sick Robot Days am 13.10.2018 bestand darin rote Metallkugeln von einer auf einer Kreisbahn fahrenden Platform zu sammeln. Dabei traten immer zwei Roboter gegeneinander an. Den Wettbewerb gewann der Roboter, der am Ende des besseren von zwei Läufen die meisten Kugeln in seiner Lagerbox hat. Aufbau des Roboters Aufgrund der …
Die Aufgabenstellung Der SICK robot day wird alle zwei Jahre vom Sensorhersteller SICK ausgerichtet. Er findet in einer Halle statt, die Aufgabe ist aber jedes mal eine andere. Dieses Jahr ging es um den Transport und das Platzieren von Würfeln mit 15cm Kantenlänge. Es treten jeweils zwei Roboter gegeneinander an. Jeder Roboter hat einen Lagerbereich …
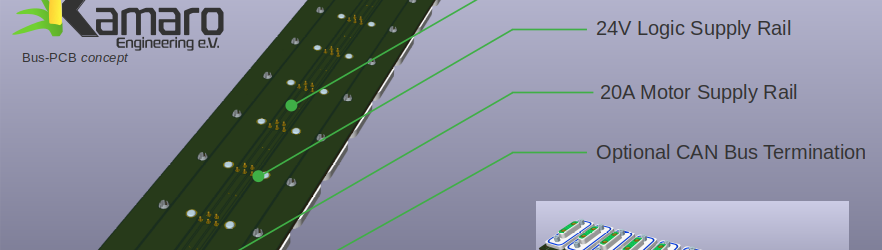
Kabel kann man auf viele Arten verlegen. In der Vergangenheit hat die Verkabelung häufiger zu Problemen geführt. So waren wir bei unserem Roboter Kamaro 2010 nicht nur immer wieder Kabelbrüchen auf der Spur, sondern mussten auch mit verpolt angeschlossenen Akkus kämpfen. Der neue Roboter Beteigeuze hatte dafür zunächst eine stabile, aber unübersichtlichen Verkabelung, die zudem …